

Space mechanical arm coordination control method based on self-adaption dynamic programming Nash game
A space manipulator and dynamic programming technology, applied in manipulators, program control manipulators, manufacturing tools, etc., can solve the problems of not being able to obtain the optimal control strategy and not having a clear control target
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0064] The present invention is described in further detail below:
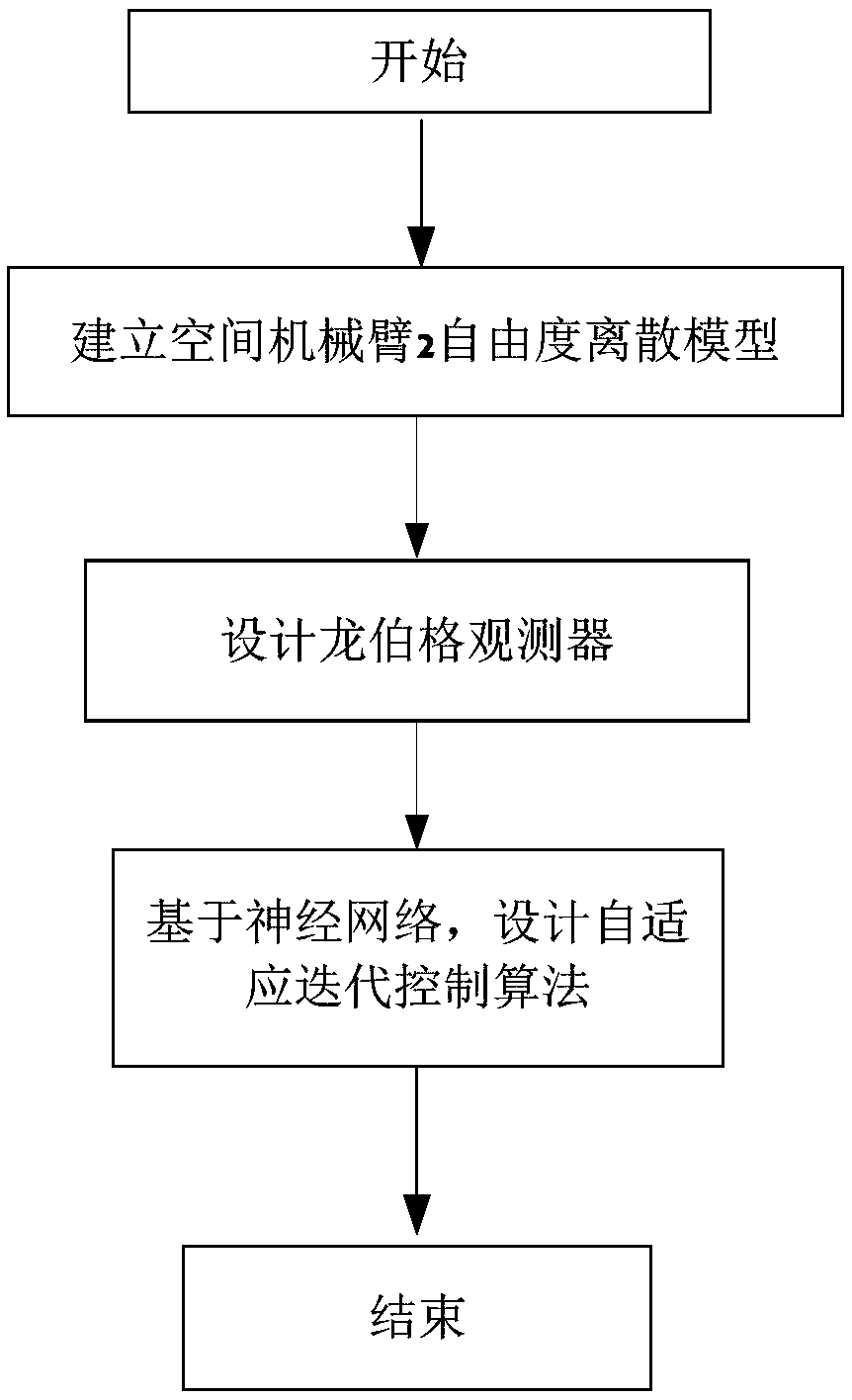
[0065] Aiming at the strong nonlinearity, strong coupling and partial state output characteristics in the space manipulator system, the present invention proposes a multi-objective approximate optimal control strategy based on adaptive dynamic programming. Firstly, a Lomberg class observer is designed to estimate All the state information in the system; secondly, design the adaptive dynamic programming iterative strategy of Nash control strategy; finally, use the neural network to approximate the multi-objective optimal control strategy.
[0066] The technical solution adopted by the present invention to solve its technical problems is: the space manipulator coordination control algorithm based on the adaptive dynamic programming Nash game is realized by the following steps:
[0067] 1. Model establishment
[0068] The dynamic model of the space manipulator is:
[0069] Among them, θ=[θ 1 θ 2 ] T , θ ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More