

Prosthetic hand sensing mechanism and system supporting cloud fusion
A cloud-based, prosthetic hand technology, applied in the field of bionic prosthetic hands, can solve the problem of lack of multi-degree-of-freedom dexterous prosthetic hands, and achieve the effects of reducing assembly complexity, stable connection structure and convenient assembly.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
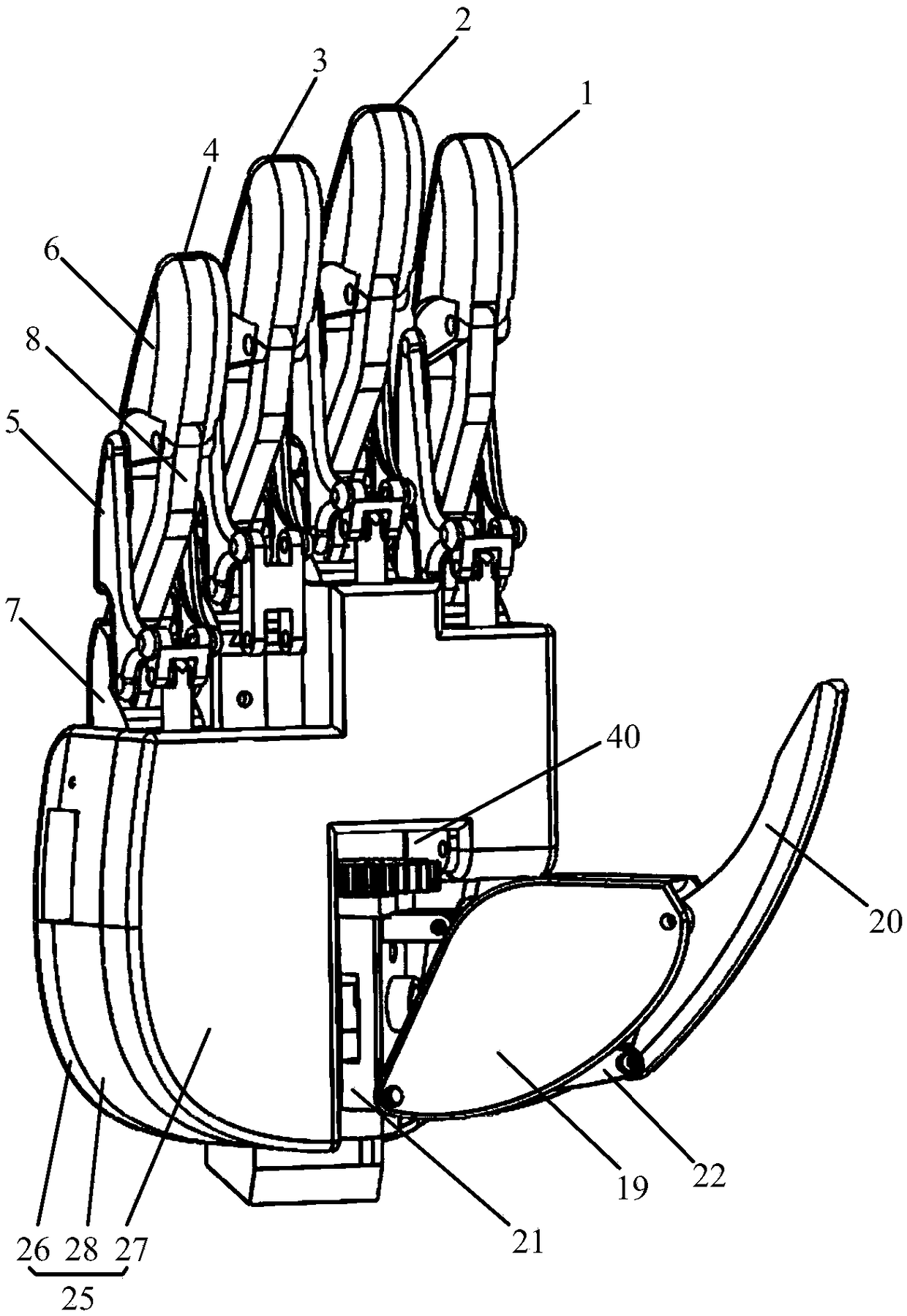
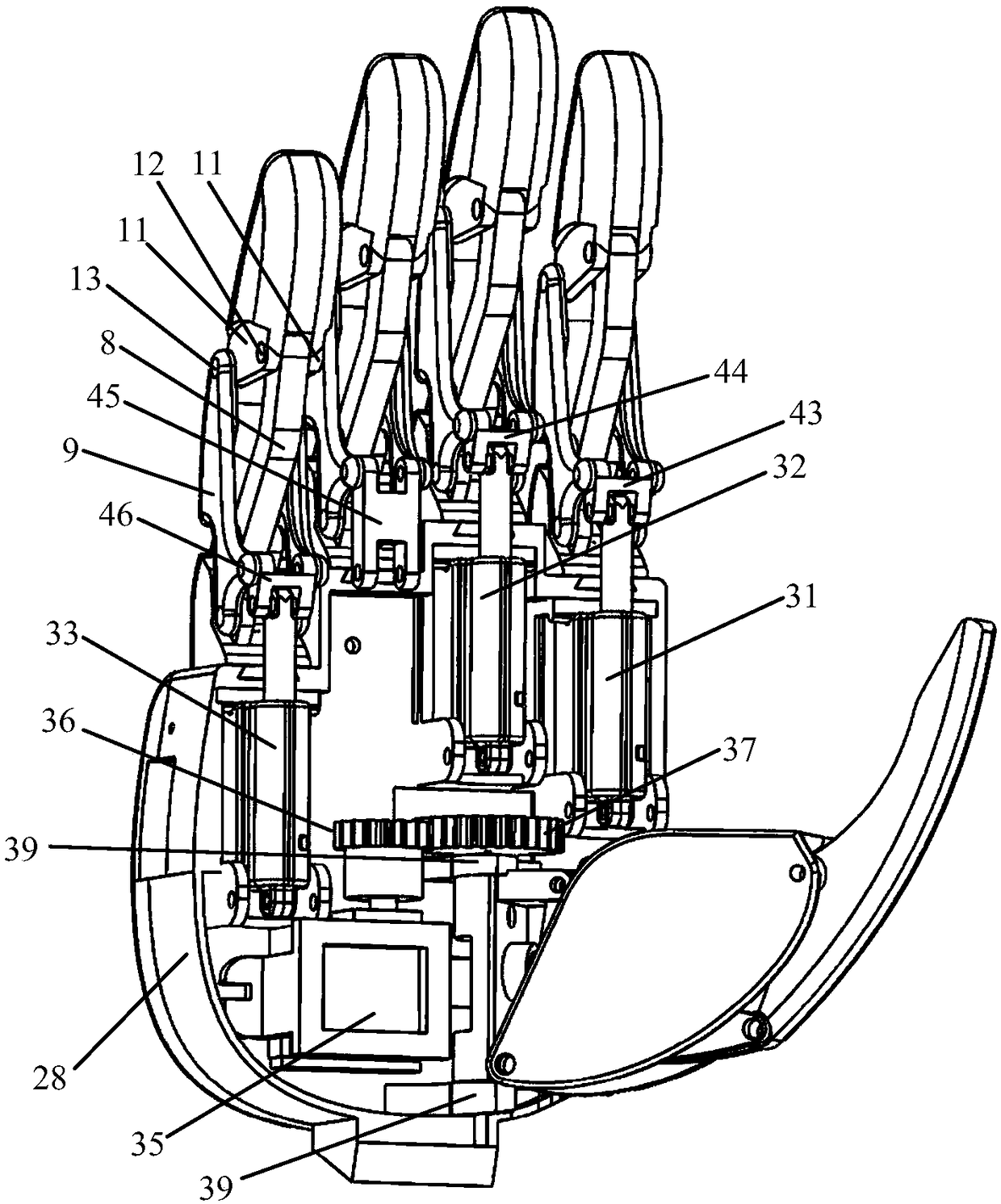
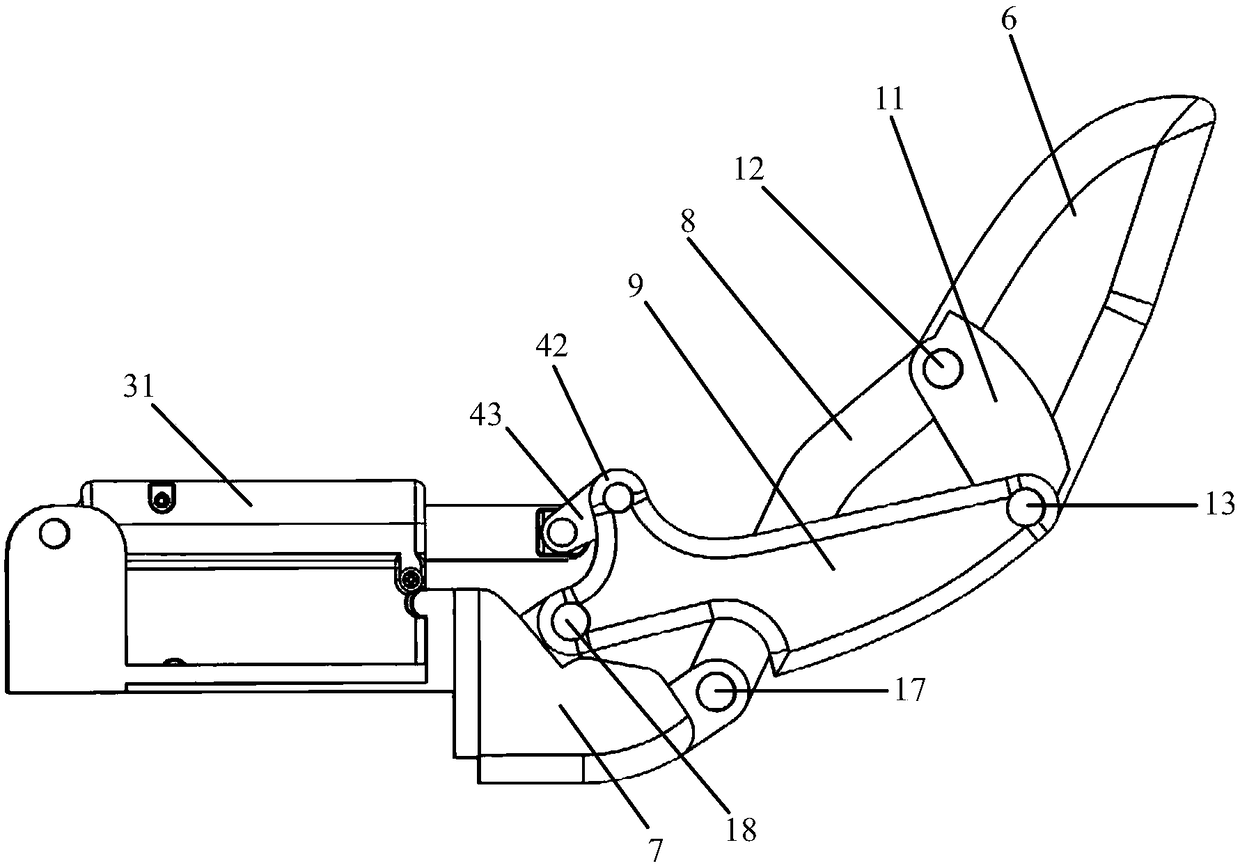
[0051] Such as Figure 1 to Figure 11 As shown, the present embodiment provides a prosthetic hand sensing mechanism that supports cloud fusion, and the prosthetic hand sensing mechanism that supports cloud fusion includes a long finger portion, a thumb portion, four connecting blocks, a palm portion and a printed circuit board;
[0052] The long finger part includes four long finger mechanisms, which are index finger mechanism 1, middle finger mechanism 2, ring finger mechanism 3 and little finger mechanism 4. Each long finger mechanism includes proximal knuckle 5, middle finger-distal knuckle 6, first palm Knuckle seat 7 and first connecting piece 8;
[0053] For each long finger body, such as Figure 5 As shown, the proximal knuckles 5 all include two relatively long finger side plates 9 and a long finger back plate 10 connecting the two long finger side plates 9, and the two long finger side plates 9 and the long finger back plate 10 are integrated. forming;
[0054] For...
Embodiment 2
[0089] This embodiment provides a prosthetic hand sensing system that supports cloud fusion, and the prosthetic hand sensing system that supports cloud fusion includes a myoelectric signal acquisition device, a cloud host computer, and the prosthetic hand sensing mechanism in Embodiment 1;
[0090] The myoelectric signal acquisition device is used to wear on the user's forearm to collect the myoelectric signal generated by the user's forearm muscle group; the myoelectric signal acquisition device can be purchased directly on the market, for example, it can be produced by Thalmic Lab Myoelectric signal acquisition equipment of the model MYO;
[0091] The cloud host computer is used to receive the myoelectric signal collected by the myoelectric signal acquisition device, and process the received myoelectric signal to obtain the gesture recognition result; the cloud host computer stores the myoelectric signal data and the gesture recognition result Mapping relationship, therefore...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More