

Space circular arc interpolation method of triaxial cartesian robot
A rectangular coordinate, space arc technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as complex calculation, achieve the effect of simple solution, reduce steps, and improve operation speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings.
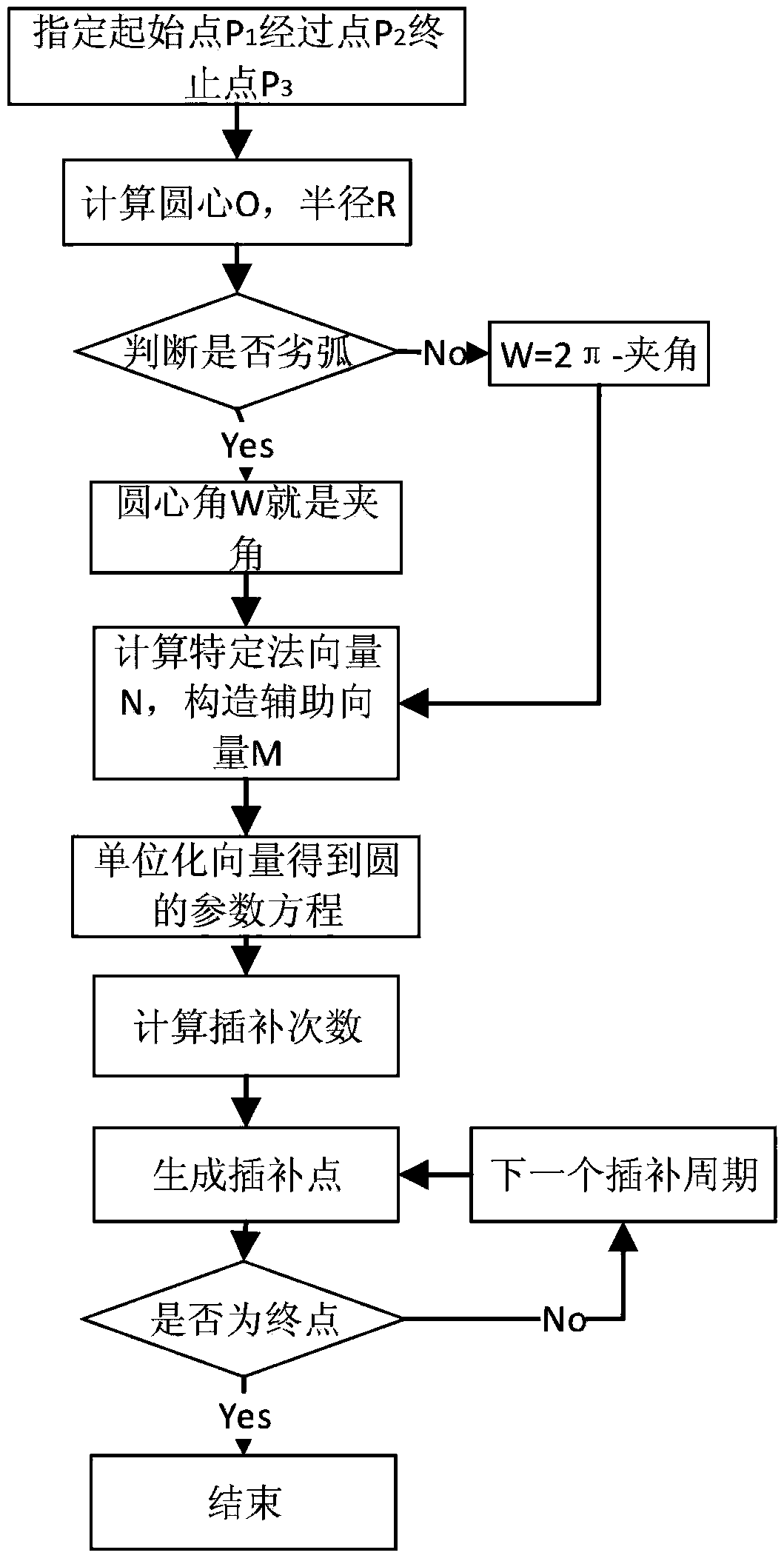
[0051] The space circular interpolation method of a kind of three-axis Cartesian coordinate robot space arc interpolation method designed by the present invention, such as figure 1 As shown, the specific process is as follows.
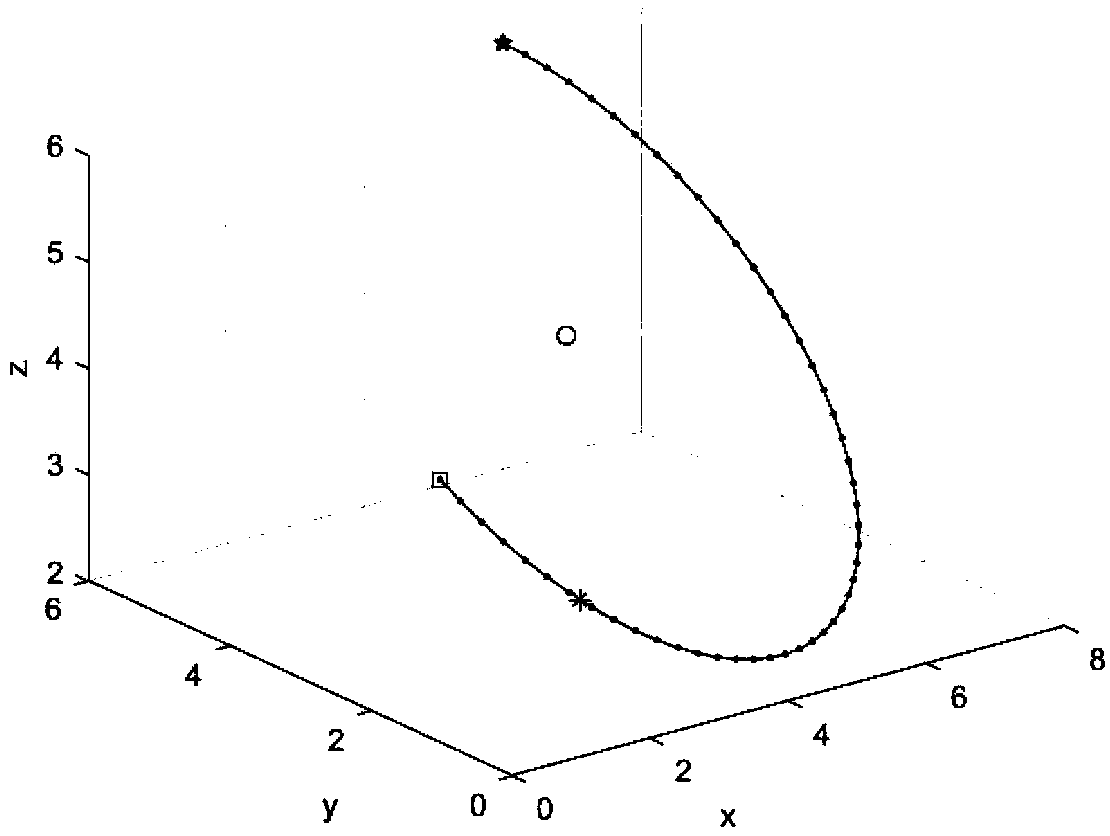
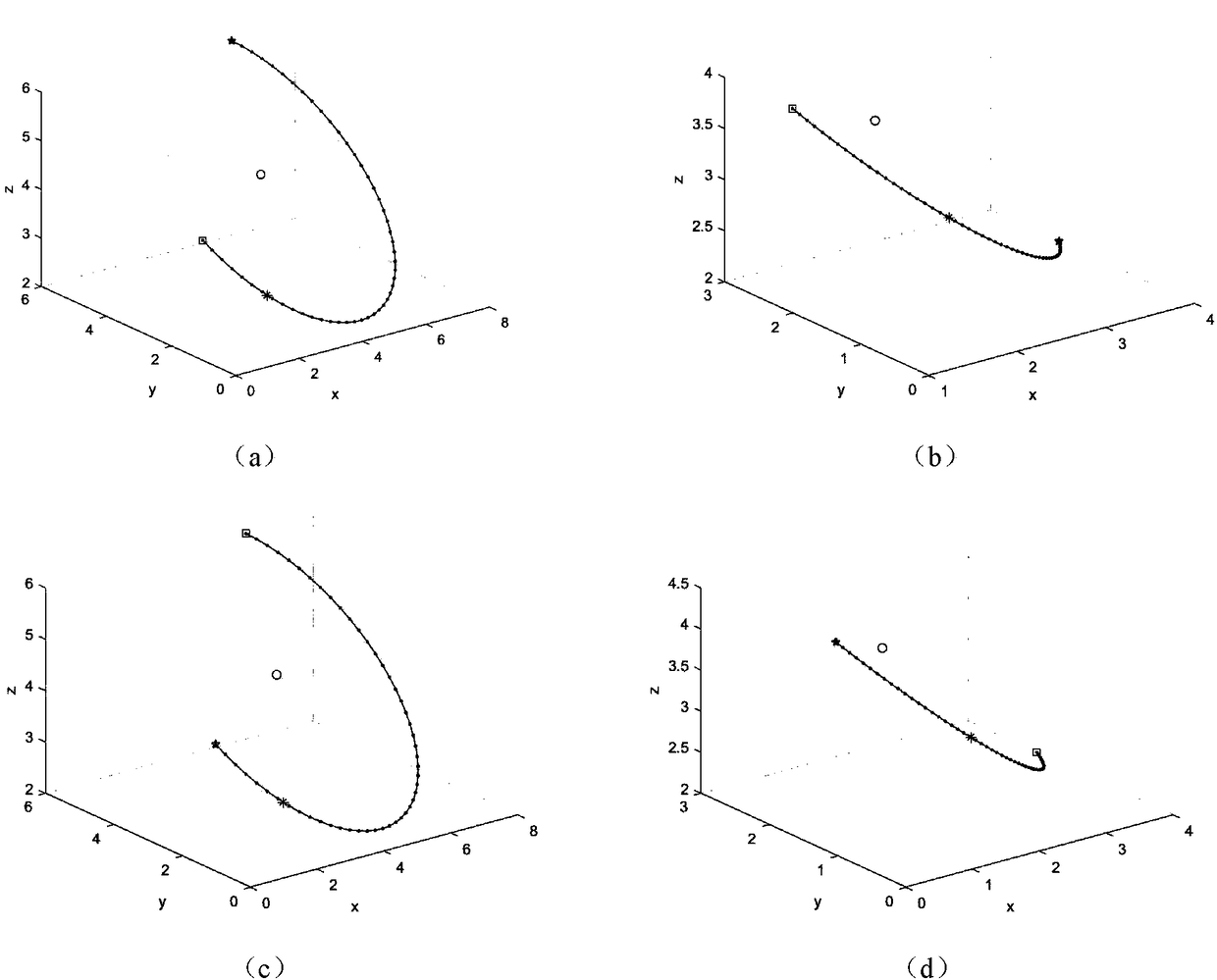
[0052] S01, specify any 3 points that are not collinear through the teaching pendant or other host computer: starting point P 1 (1,2,4), through point P 2 (2, 1, 3), end point P 3 (6,6,6).
[0053] S02, substitute three points into the center of the circle O(o x ,o y ,o z ), the analytical formula of radius R, which is obtained by solving the two constraints of three points being coplanar and three points being equal to the center of the circle;
[0054] A 1 =y 1 *z 2 -y 1 *z 3 -z 1 *y 2 +z 1 *z 2 +y 2 *z 3 -z 2 *z 2 = 2;
[0055] B 1 =-x 1 *z 2 +x1*z 3 +z 1 *x 2 -z 1 *z 1 -x 2 *z 3 +z...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More