

BIM-based mini unmanned aerial vehicle networking operation method
A drone, miniature technology, applied in the field of drones
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
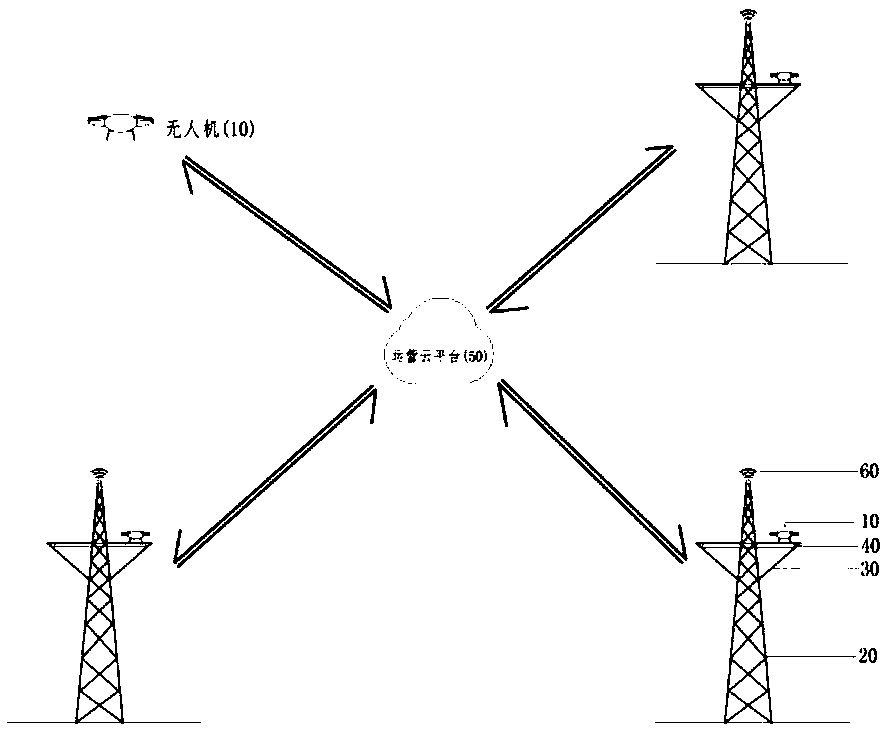
[0012] Such as Figure one The BIM-based micro drone (10) networking operation mode shown is that when the micro drone (10) reaches the set working time limit and has not completed the task during the task operation, operating the cloud platform (50) The work connection mode will be activated.
[0013] The working connection mode is that the operating cloud platform (50) queries the available communication tower (20) near the micro drone (10). The available meaning is that the communication tower (20) carries a fully charged backup micro drone (10). ) And landing platform (30), send instructions to call the backup micro drone (10) to connect to the micro drone (10) that needs to be charged, and the replaced micro drone (10) flies to the communication tower (20) ), start charging after landing.
[0014] The micro unmanned aerial vehicle (10) that continues the operation task continues the task according to the original operation requirements provided by the operating cloud platfor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More