A vehicle motion model optimization method based on deep learning
A vehicle motion model and deep learning technology, applied in the field of intelligent driving, can solve problems such as large error, discrete data collection, and inability to correctly solve the β-centroid declination.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The principles and features of the present invention will be described below with reference to the accompanying drawings. The examples cited are only used to explain the present invention and not used to limit the scope of the present invention.
[0037] The present invention provides a method for optimizing a vehicle motion model based on deep learning, including the following contents:
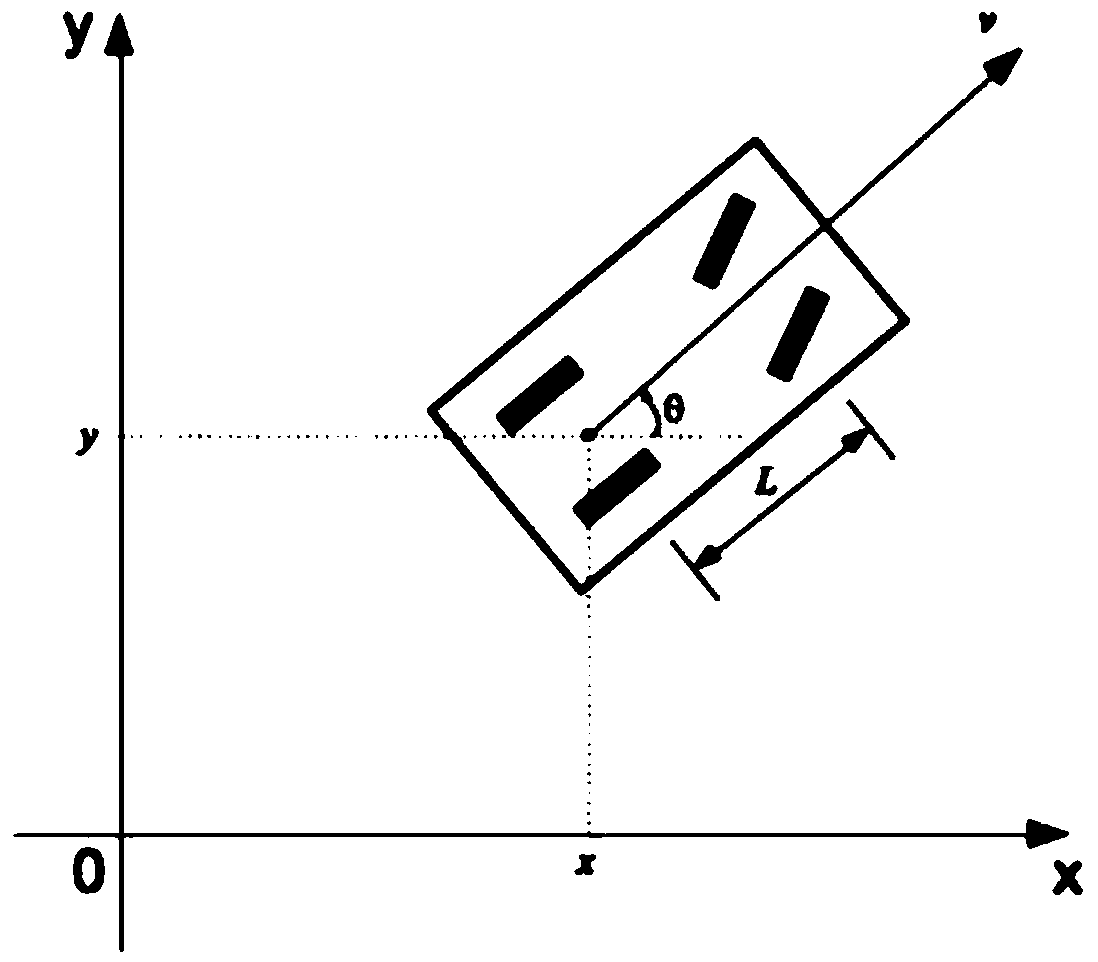
[0038] 1. Establish the basic motion equation of the vehicle. Corresponding to the mechanical characteristics of the vehicle motion under a given steering input, the basic motion equation of the vehicle at any given front wheel deflection angle δ is derived through the mechanical equation, which is not affected by its position relative to the ground fixed coordinate system and its heading influences.
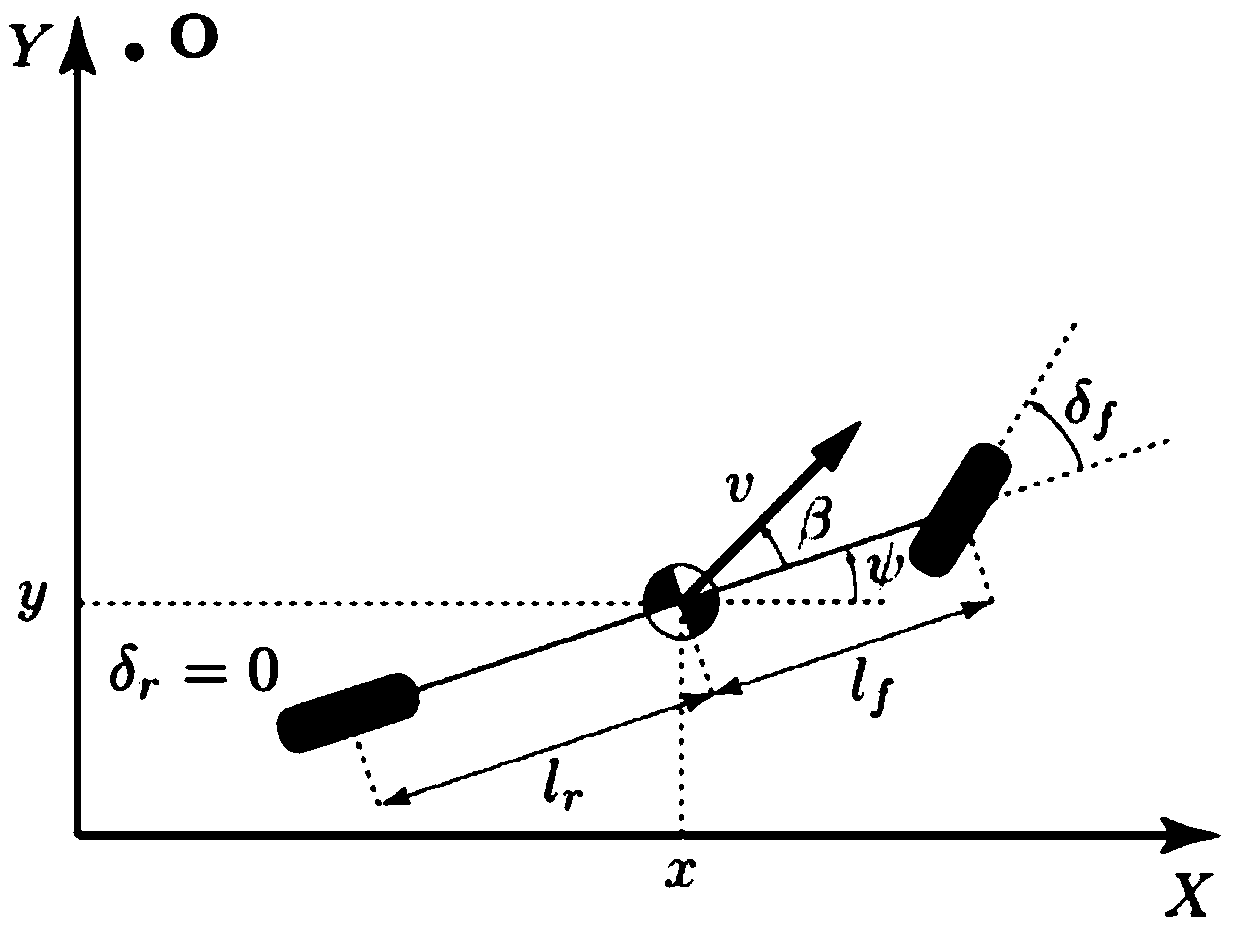
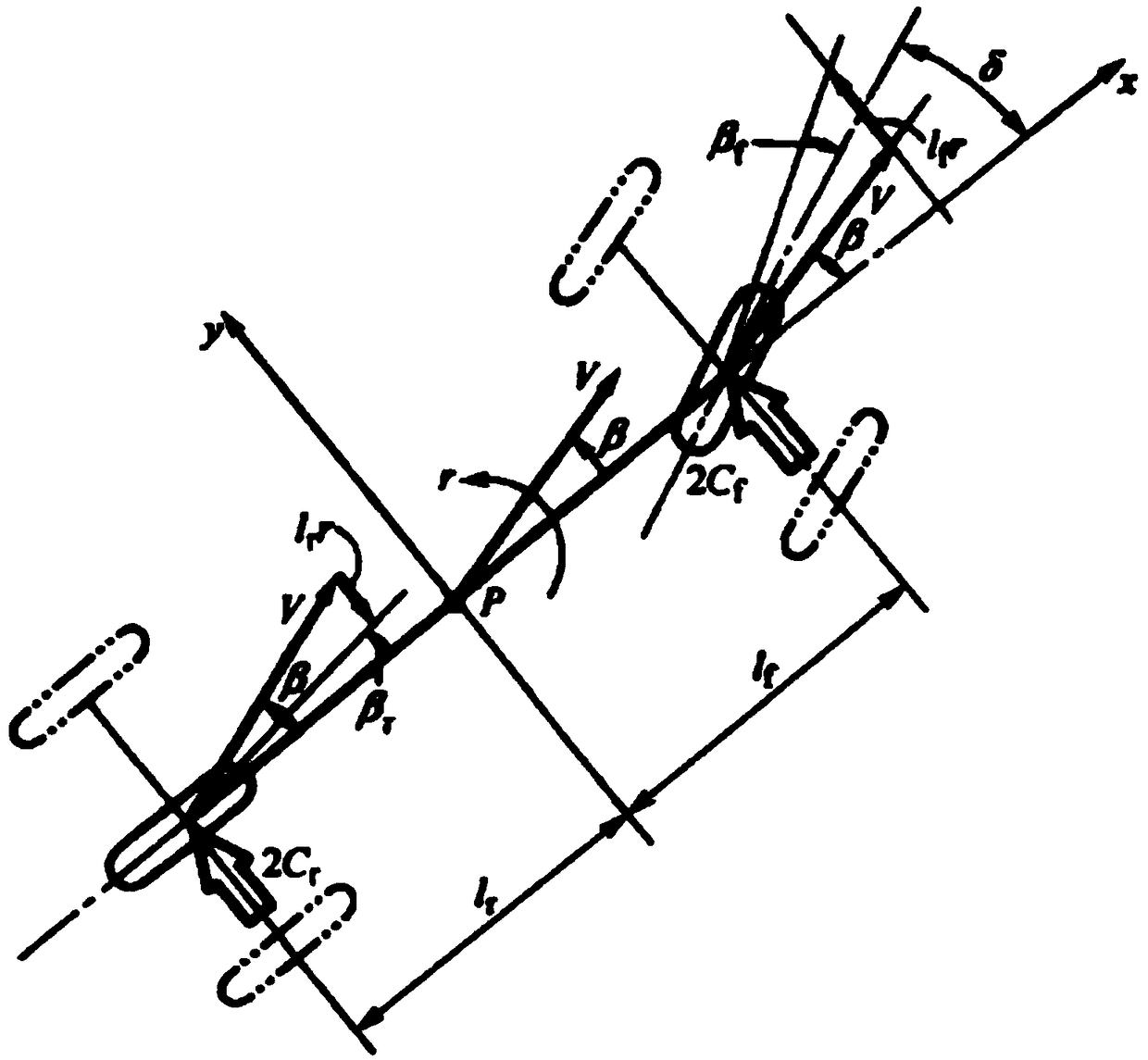
[0039] 2. Establish steering system model and motion equation. The influence of the characteristics of the steering system on the vehicle dynamics is deduced, and the motion equation of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com