

A fully automatic window cleaning robot capable of surmounting obstacles
A fully automatic and robotic technology, used in window cleaning, cleaning equipment, household appliances, etc., can solve the problems of manual window cleaning, time-consuming, low efficiency, inability to climb over, inability to cross gaps, etc. , the effect of high reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
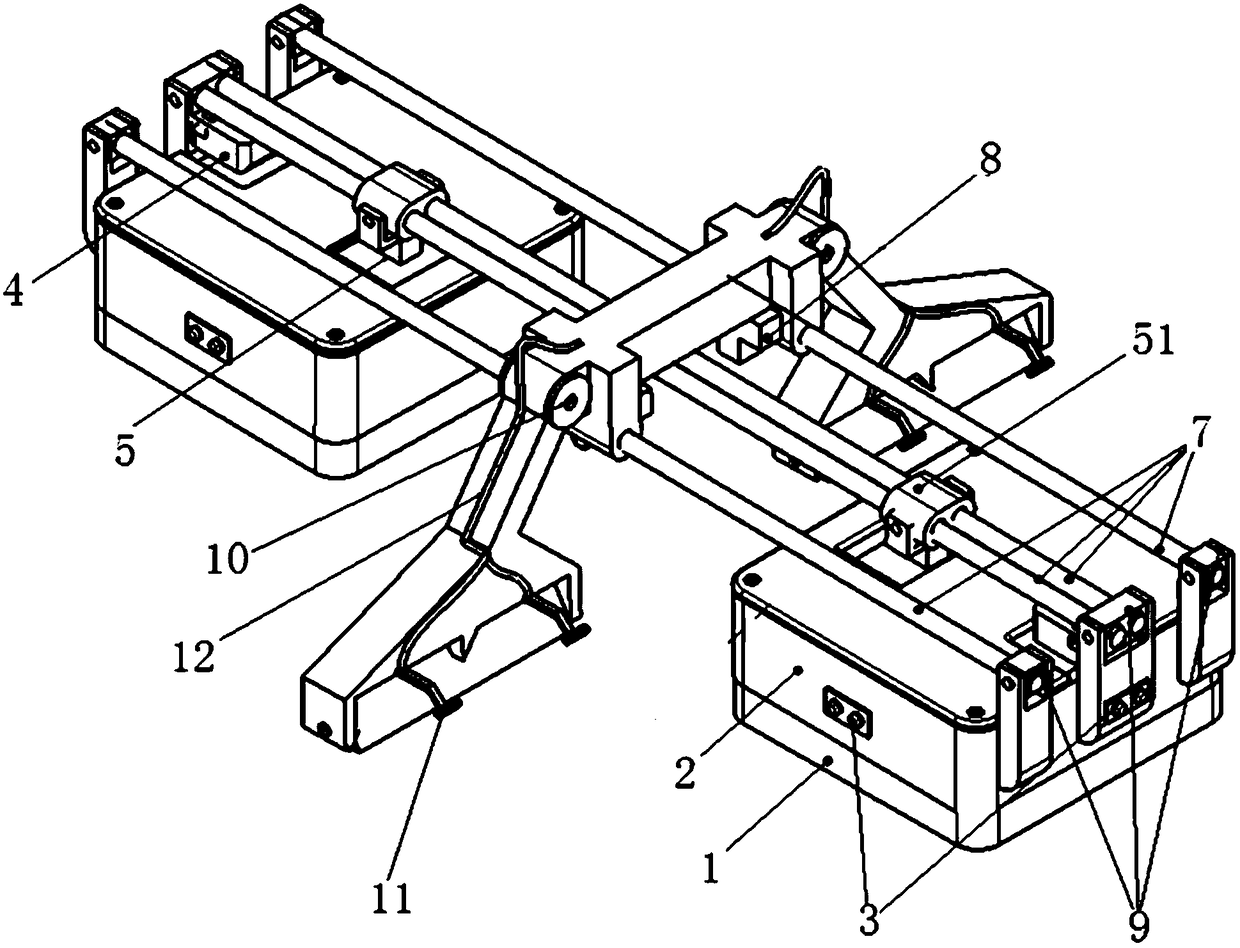
[0060] A fully automatic window cleaning robot capable of surmounting obstacles, including a shell structure and a scrubbing structure;
[0061]The front and rear of the shell structure are oppositely arranged, and each shell structure is composed of upper and lower layers. The shaft is connected, the bottom surface of the steering chassis 1 is connected to the sucker, the main structure 2 is provided with a water supply device, a power supply device, and a steering gear 15; the outside of the main structure 2 is provided with a distance sensor 3; the surface of the shell structure is provided with a motor reduction box b4 , lifter 5, axle sleeve 51 and rack fixing device that play a sliding role;
[0062] The power supply device includes a motor, a power module and a circuit board interlayer 6; the power module is connected to the motor, and the power module and the motor are all arranged in the circuit board interlayer 6; the steering gear 15 is connected to the central shaf...
Embodiment 2
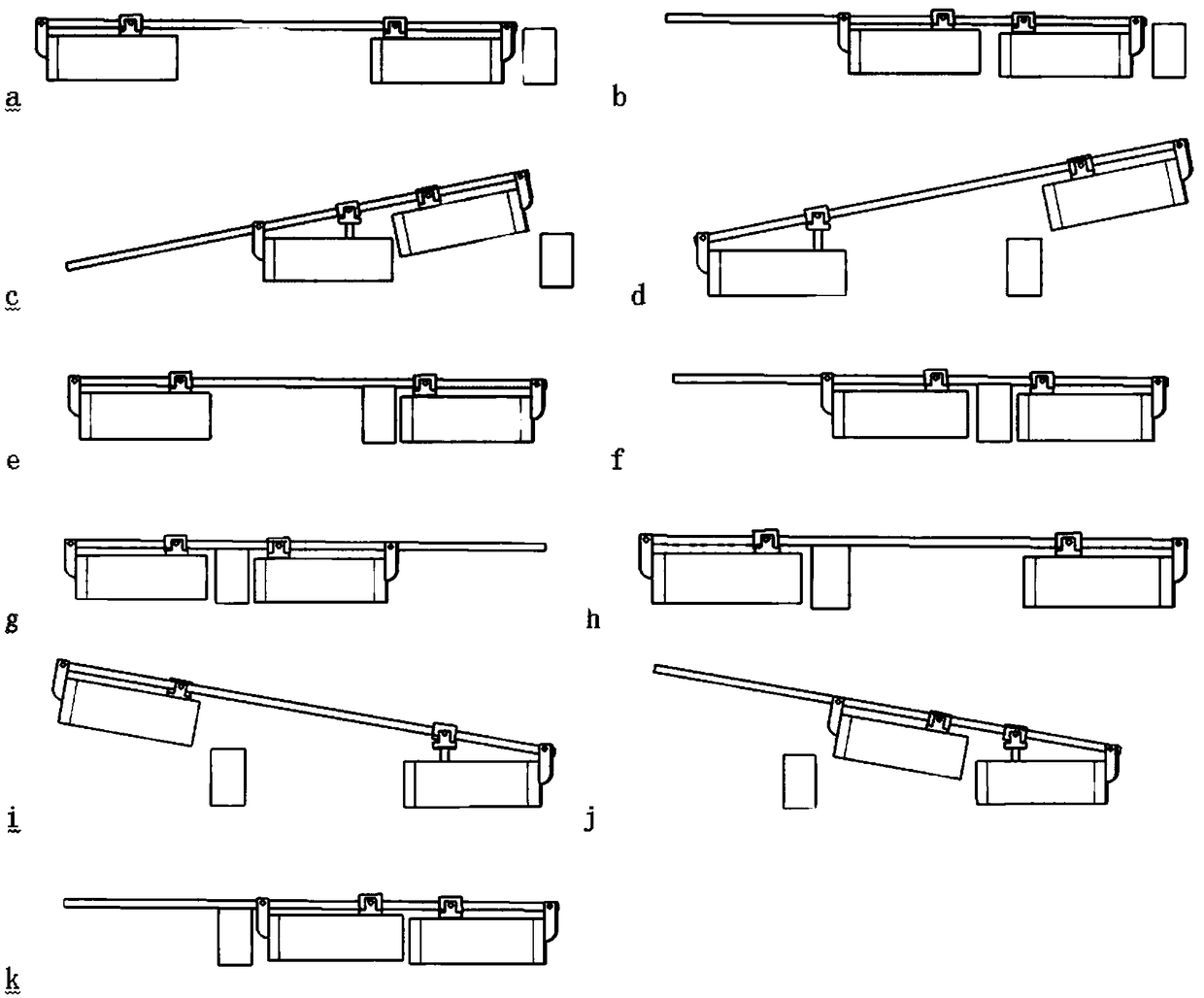
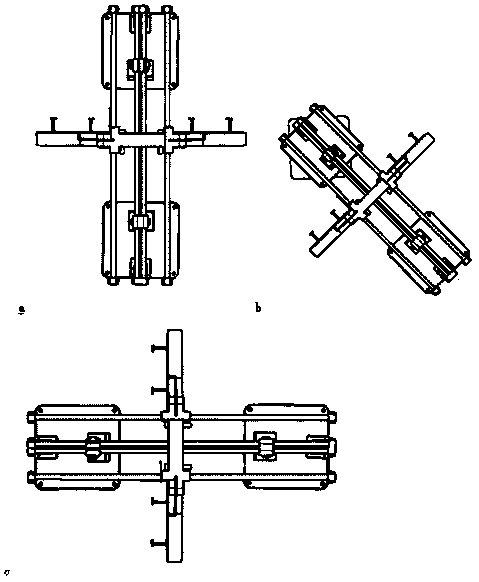
[0076] An obstacle-surmounting method of a fully automatic window-cleaning robot that can overcome obstacles, such as Figure 4 , 5 Shown is a schematic diagram of an obstacle-surmounting method and a schematic diagram of an in-situ steering method for a fully automatic window-cleaning robot that can overcome obstacles;
[0077] The steps of the obstacle surmounting method include: a fully automatic window cleaning robot capable of surmounting obstacles moves to a working plane with raised obstacles. The front edge of the shell structure 1 at the front stops moving when it touches an obstacle. The steering chassis at the bottom surface of the shell structure at the rear unclamps the working plane, and lifts up a small height by the lifter 5 . The steering chassis 2 on the bottom surface of the rear shell structure approaches the front shell structure, and sucks the working plane after approaching. The steering chassis 2 on the front shell structure bottom surface unclamps th...
Embodiment 3
[0079] A steering method of a fully automatic window cleaning robot capable of overcoming obstacles
[0080] First move to the rotatable plane, the steering chassis on the bottom surface of the front shell structure is decompressed and adsorbed on the working surface, the steering chassis on the bottom surface of the rear shell structure is pressurized to make it detached from the working surface, and the steering chassis on the bottom surface of the front shell structure The motor reducer When working, the upper and lower parts of the front shell structure are relatively rotated through gear meshing. When the rotation is in a suitable position, there is a negative pressure device in the shell structure to control the decompression and pressurization of the suction cup to adsorb on the working surface, and the cleaning work can be carried out.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More