

An automatic cleaning device and method for floating garbage in water area
An automatic cleaning and garbage technology, which is applied to the cleaning of open water, motor vehicles, water conservancy projects, etc., can solve the problems of high work intensity, potential safety hazards, and low salvage efficiency of operators, so as to improve operating efficiency and ensure safety. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
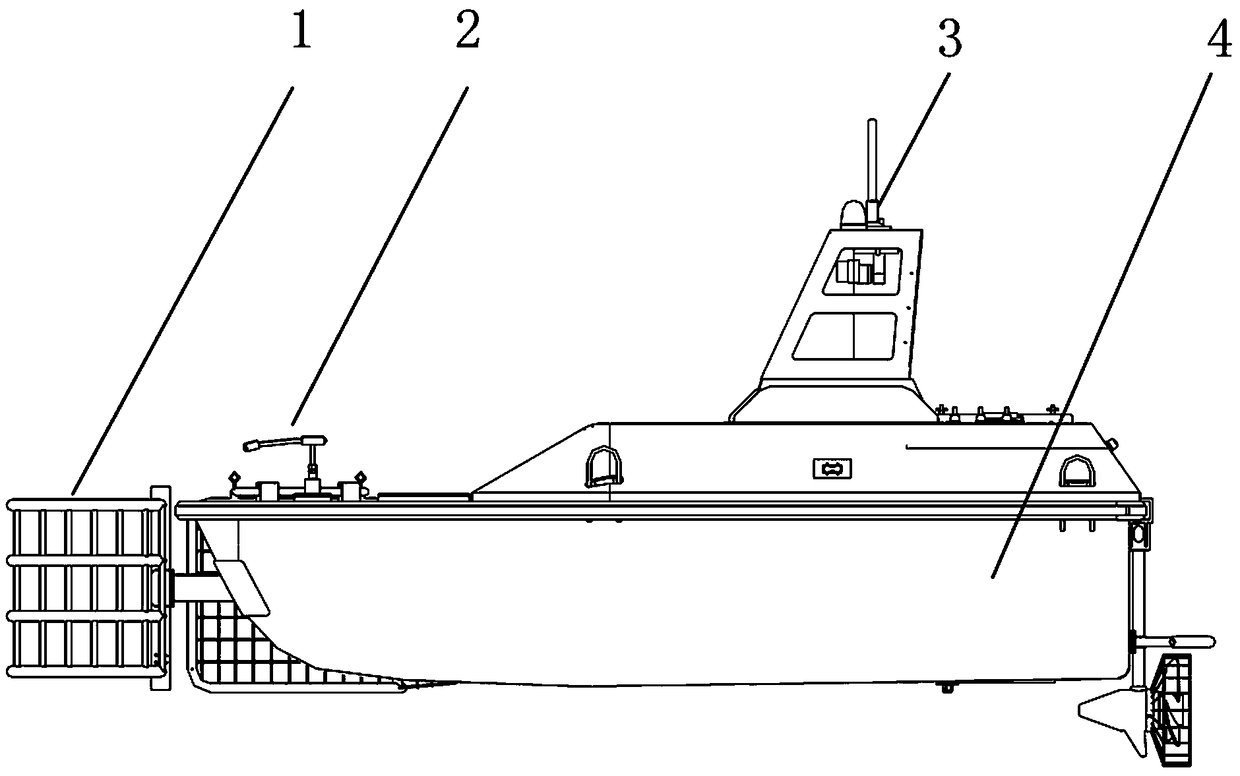
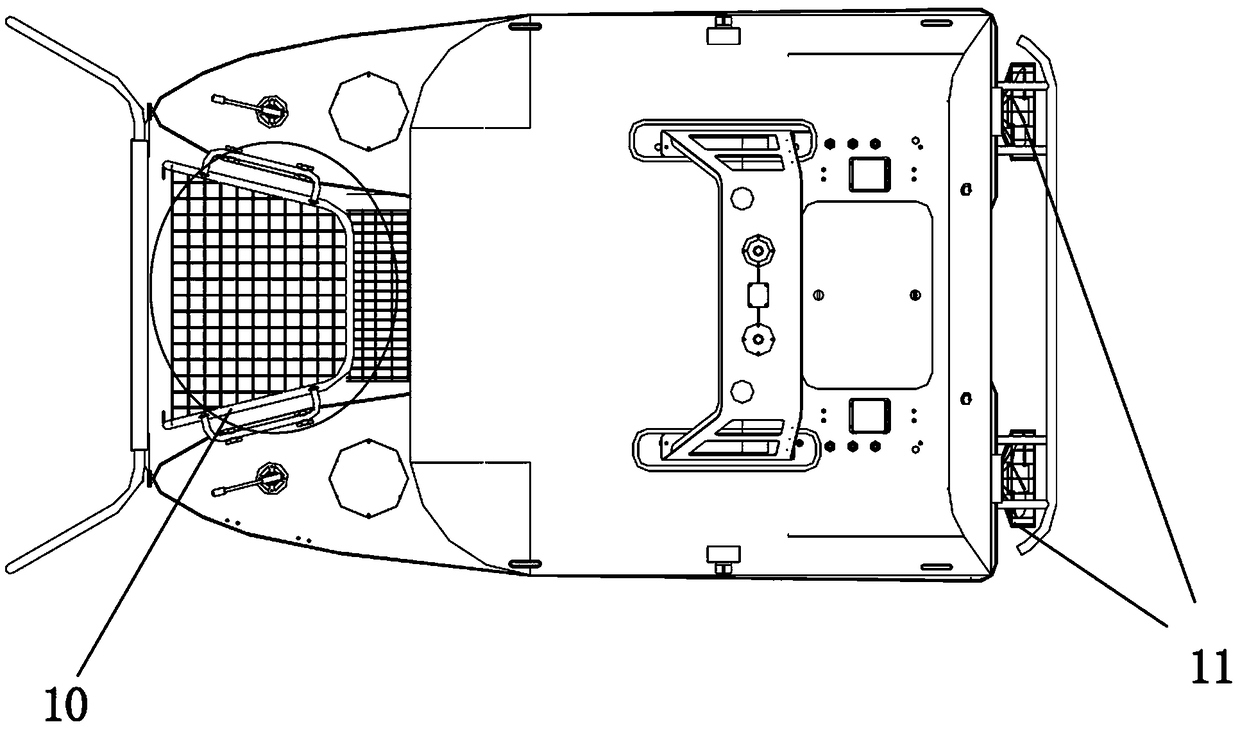
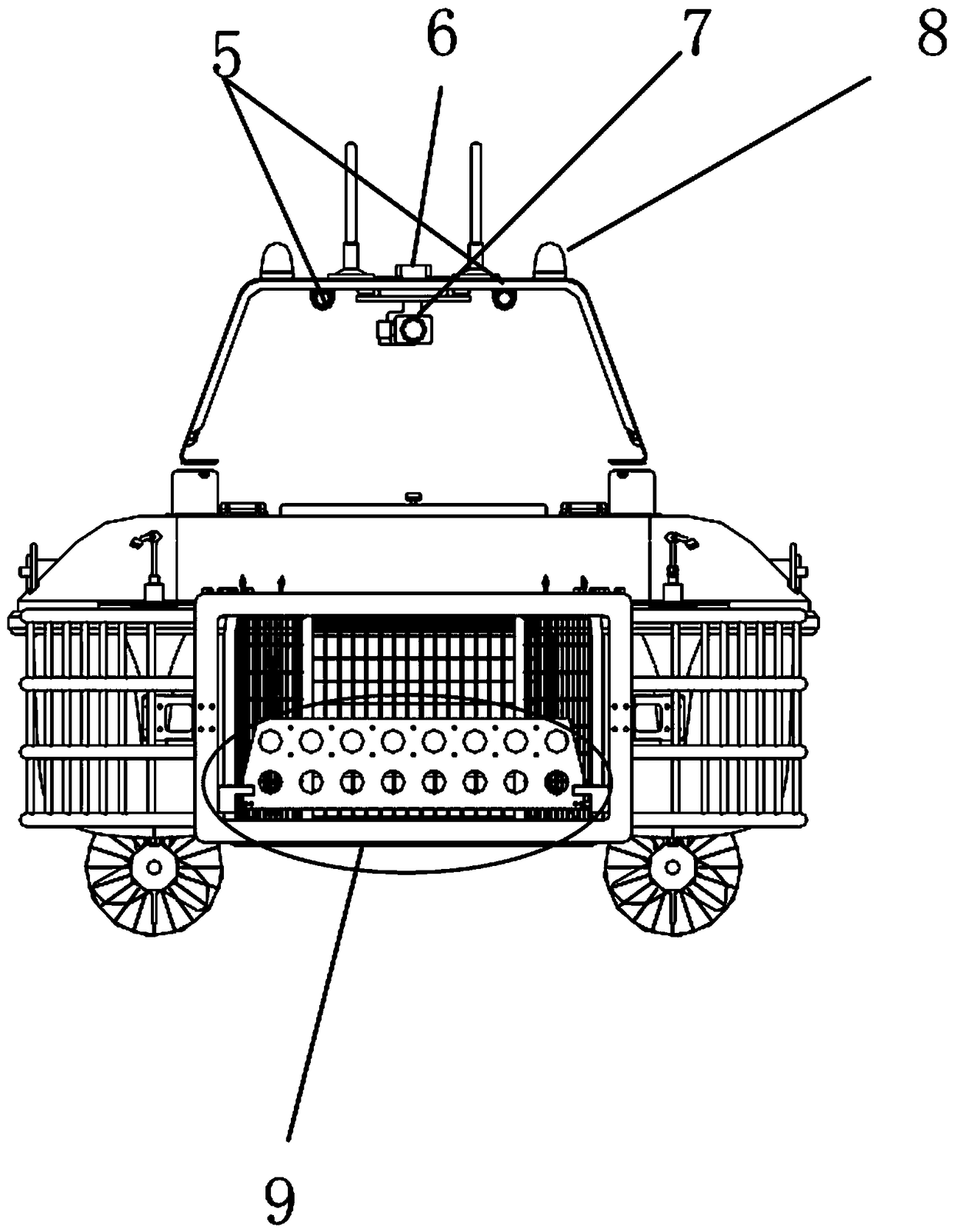
[0037] see Figure 1-6 , an automatic cleaning device for floating garbage in water areas, which includes a hull 4, a push bucket 1 for collecting floating objects is installed at the front end of the hull 4, a communication antenna 3 is fixedly installed on the top of the hull 4, and a push bucket 1 is located at the end of the hull 4. A garbage basket 10 is detachably installed on the hull 4, and a searchlight 5, an ultrasonic radar 6, a camera 7 and a warning light 8 are arranged on the top of the hull 4, and the entrance position of the garbage basket 10 is provided with a barrier to prevent garbage from floating out. An anti-drifting structure 9; the communication antenna 3 is connected to the remote control equipment on shore by wireless or wired means. By adopting the automatic cleaning device with the above-mentioned structure, it is possible to overcome the inconvenience of garbage cleaning in open waters, semi-closed waters and closed waters, and realize automatic an...
Embodiment 2
[0044] The method for clearing and drifting of any one of the automatic cleaning devices for floating garbage in water areas, it comprises the following steps:
[0045] Step 1: Place the hull 4 in the waters that need to be cleaned and drift, and remotely control the propeller 11 through the remote control device on the shore, and drive the hull 4 to sail along the clear waters through the propeller 11;
[0046] Step2: During the propulsion process of the hull 4, the push bucket 1 pushes and gathers the floating objects on the water surface;
[0047] Step3: Push the collected garbage into the garbage basket 10 through the push bucket 1, and collect it through the net bag 14;
[0048] Step4: During the continuous propulsion process of the hull 4, the ultrasonic radar 6 is used to detect the distance between the automatic cleaning device for floating garbage in the water area and the boundary of the water area in front. When the distance is less than the set value, the hull 4 is...
Embodiment 3
[0056] The hull 4 is a catamaran structure, and a set of propellers 11 are respectively installed at the bottom of the left and right sides of the ship. When the rotating speed has a speed difference, the turning of the hull 4 can be realized, and the rotating speed of the propellers 11 on the left and right sides of the ship can be controlled respectively by the control circuit inside the hull 4, so as to realize the going straight and turning of the hull 4. The remote control equipment on the shore can realize the control to the control circuit through the communication antenna 3, and the control circuit itself can also automatically control the movement of the hull 4 according to its built-in program.
[0057] The push bucket 1 is installed in the middle of the front part of the hull 4, and when the hull 4 moves, the retracted structure of the push bucket 1 can realize the pushing and gathering of floating objects on the water surface. The garbage basket 10 is fixed between...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More