

Three-dimensional space multi-target path planning method combining RRT algorithm and ant colony algorithm
A three-dimensional space and path planning technology, applied in navigation and calculation tools, etc., can solve problems such as huge computational burden, and achieve the effect of avoiding a large amount of redundant calculation, retaining goodness, and saving calculation time.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The principles and specific implementation methods of the present invention will be described below in conjunction with the accompanying drawings.
[0023] The present invention provides a three-dimensional space multi-target path planning method that integrates RRT and ant colony algorithm. The process includes:
[0024] Step A: Calculate the initial path cost between each target point;
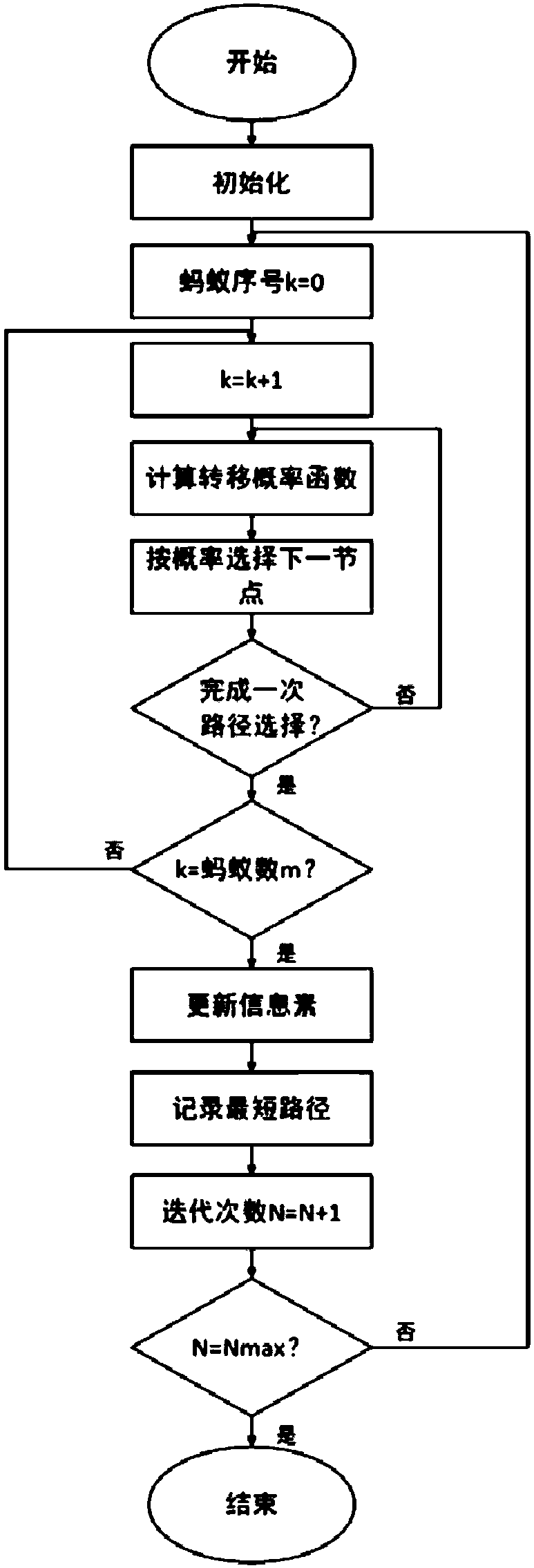
[0025] Step B: The multi-objective path planning problem in three-dimensional space is equivalent to the ordinary traveling salesman problem with known path cost, and an ant colony algorithm iteration is performed to obtain the optimal loop that traverses all target points in this iteration, and in the iterative process record the number of ants passing through each section of the path;
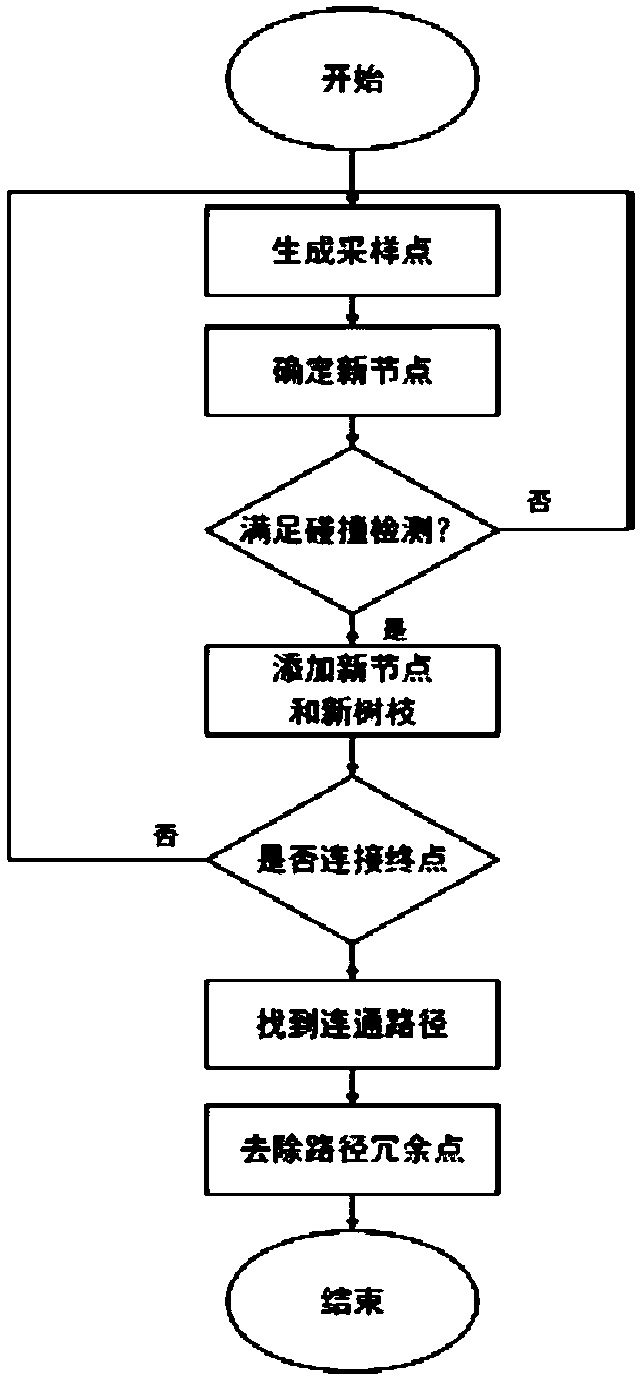
[0026] Step C: Compare the passing times of ants on each section of the path with the threshold N, if it exceeds the threshold, call RRT to update the path cost of this section, and execute step D,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More