

Positioning control method and system of flexible mechanical arm based on vision
A flexible manipulator, positioning control technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of flexible manipulator dynamic characteristics deviation, poor motion accuracy of flexible manipulator, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] It should be noted that, in the case of no conflict, the embodiments in the present application and the features in the embodiments can be combined with each other.
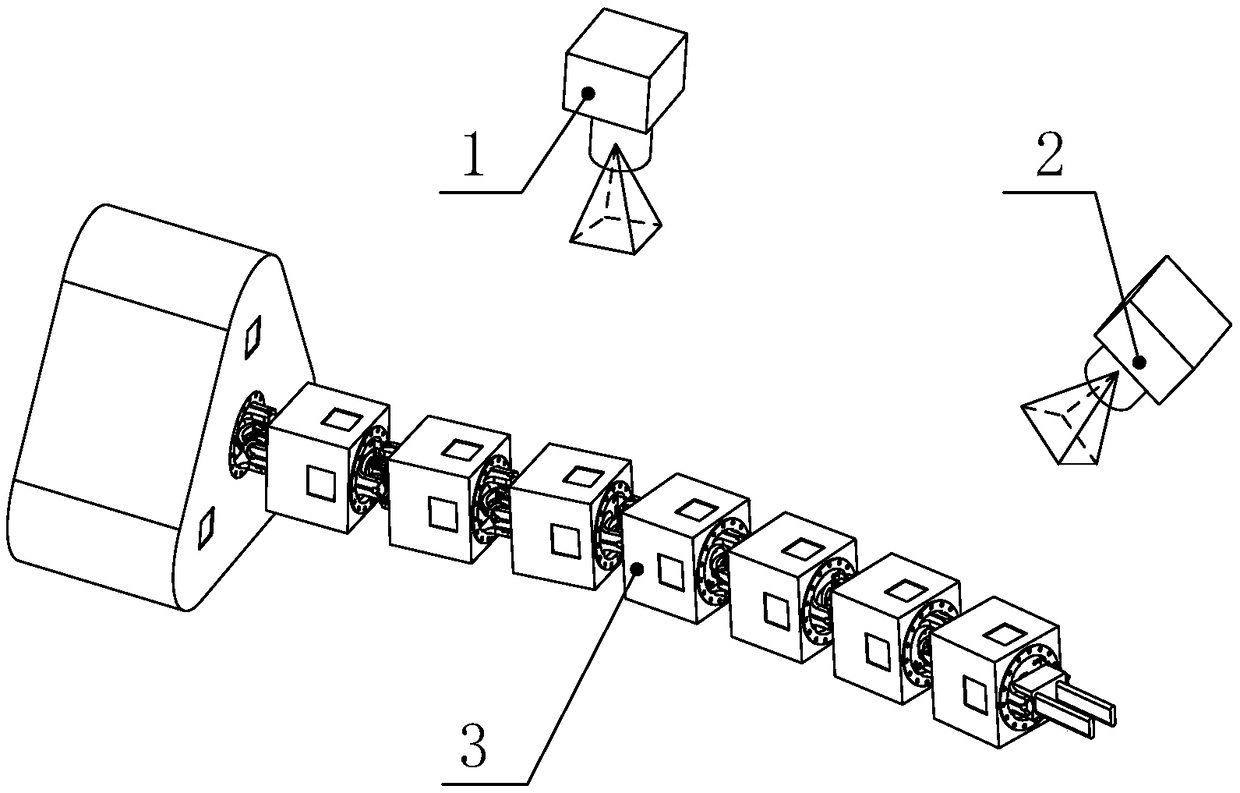
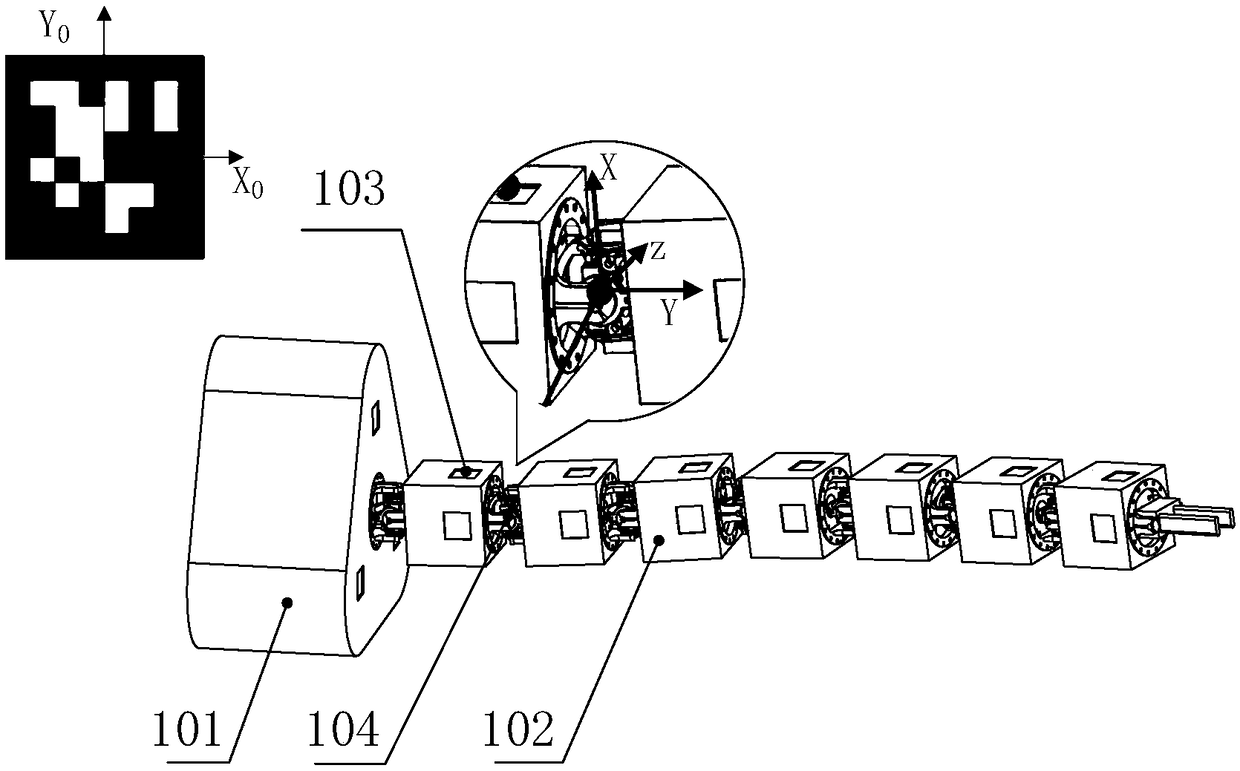
[0029] refer to Figure 1-2 , a vision-based positioning control system for a flexible manipulator provided by the present invention, including: a base 101 and a manipulator module 102, and also includes a first camera 1, a second camera 2, a microprocessor (not shown in the figure) Out); Wherein, on each manipulator module 102 is provided with characteristic area 103, and described first camera 1 and second camera 2 are connected with described microprocessor respectively; Said first camera 1 and second camera 2 are used to collect the information of the characteristic area 103 of the manipulator and the information of the characteristic area of the end of the manipulator 102 respectively.
[0030] Use the first camera 1 and the second camera 2 to take pictures and capture the characteristic area 103 (...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More