

Micro-gripper for measuring clamping force and jaw displacement by optical fiber Fabry-Perot interferometer
An interferometer and clamping force technology, applied in the field of micro clamps, can solve the problems of inability to accurately measure the clamping force and jaw displacement, and achieve the effect of simple structure, small resolution and high sensitivity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
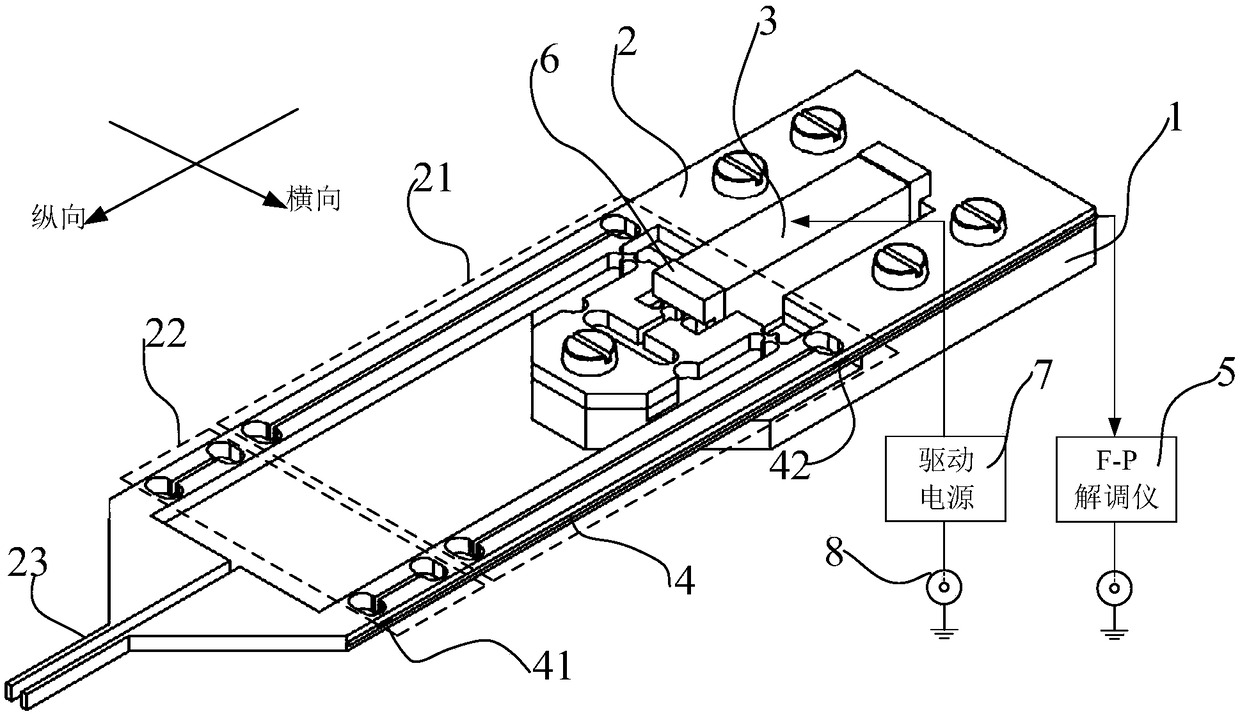
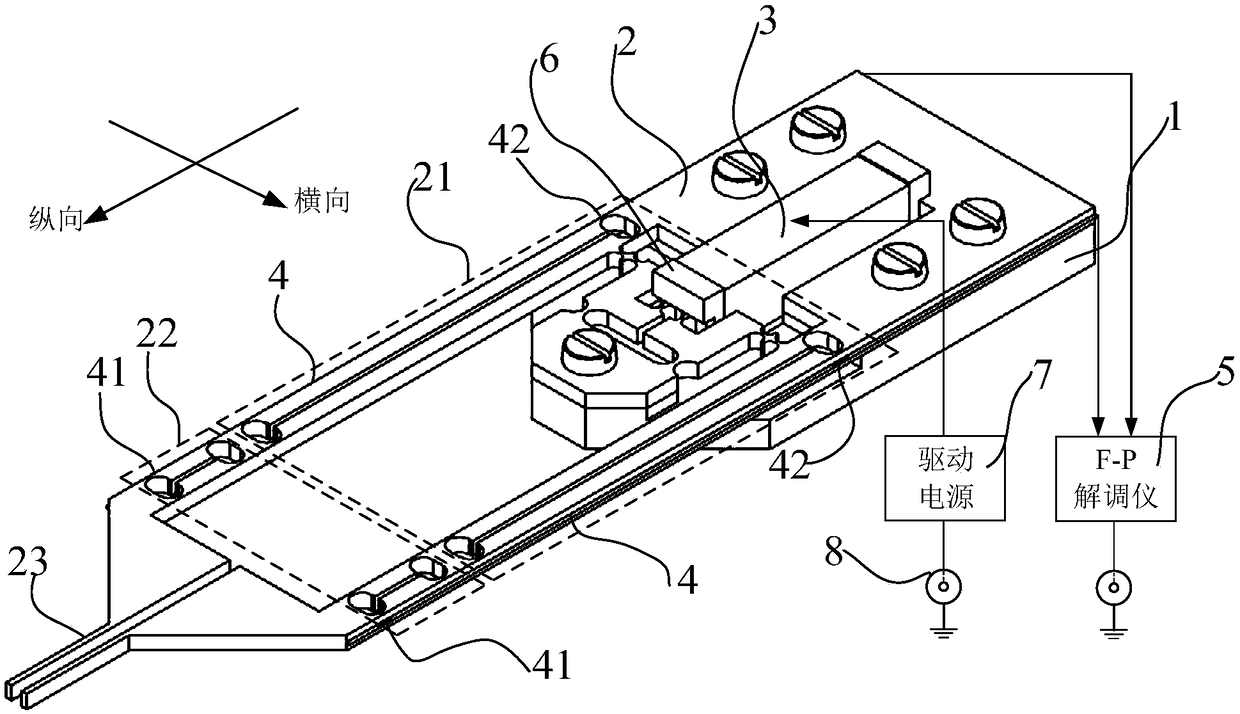
[0049] Reference Figure 1 to Figure 14 , The present invention provides a micro-clamp that uses an optical fiber Fabry-Perot (Fabry-Perot) interferometer to measure the clamping force and the displacement of the clamping jaws, including: a base 1, a single piece fixed on the base 1. The flexible mechanism 2, the actuator 3 installed in the cavity opened on the single-piece flexible mechanism 2, the controller, the FP demodulator 5 connected to the controller, and the optical fiber Fabry-Perot complex connected to the FP demodulator 5 With the sensor 4, the single-piece flexible mechanism 2 includes: a displacement amplifying mechanism 21, two symmetrically arranged clamping force sensing mechanisms 22, and two symmetrically arranged clamping jaws 23, an input stage 211 of the displacement amplifying mechanism 21 and an actuator 3 In abutment, the two output stages 212 of the displacement amplifying mechanism 21, the two clamping force sensing mechanisms 22 and the two clamping ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More