Pipe dredging robot based on wall supporting linkage mechanism and use method thereof
A link mechanism and robot technology, applied in waterway systems, water supply devices, buildings, etc., can solve the problems of size interference and large robot dimensions, and achieve the effects of reasonable structural design, improved automation and intelligence, and convenient air pressure control.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
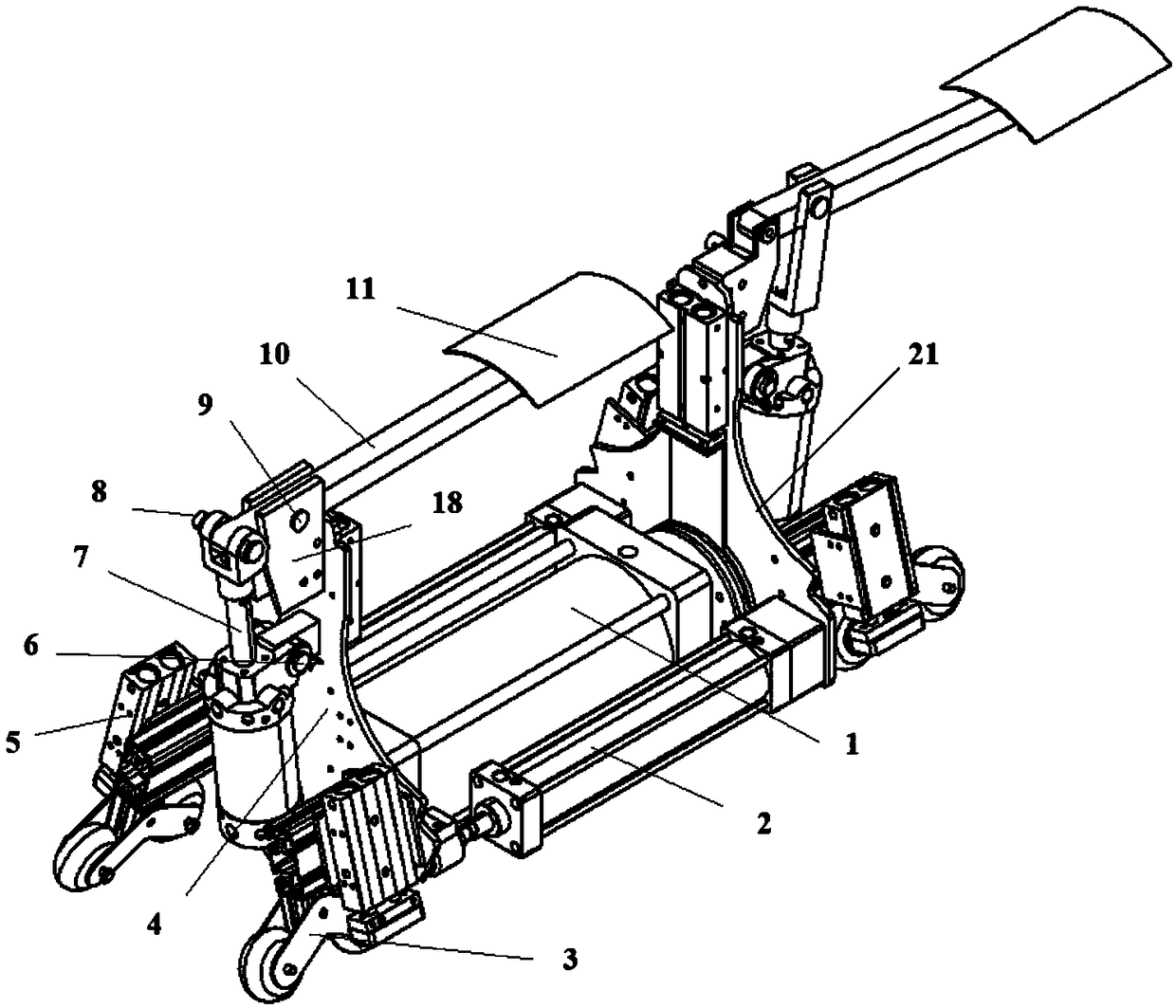
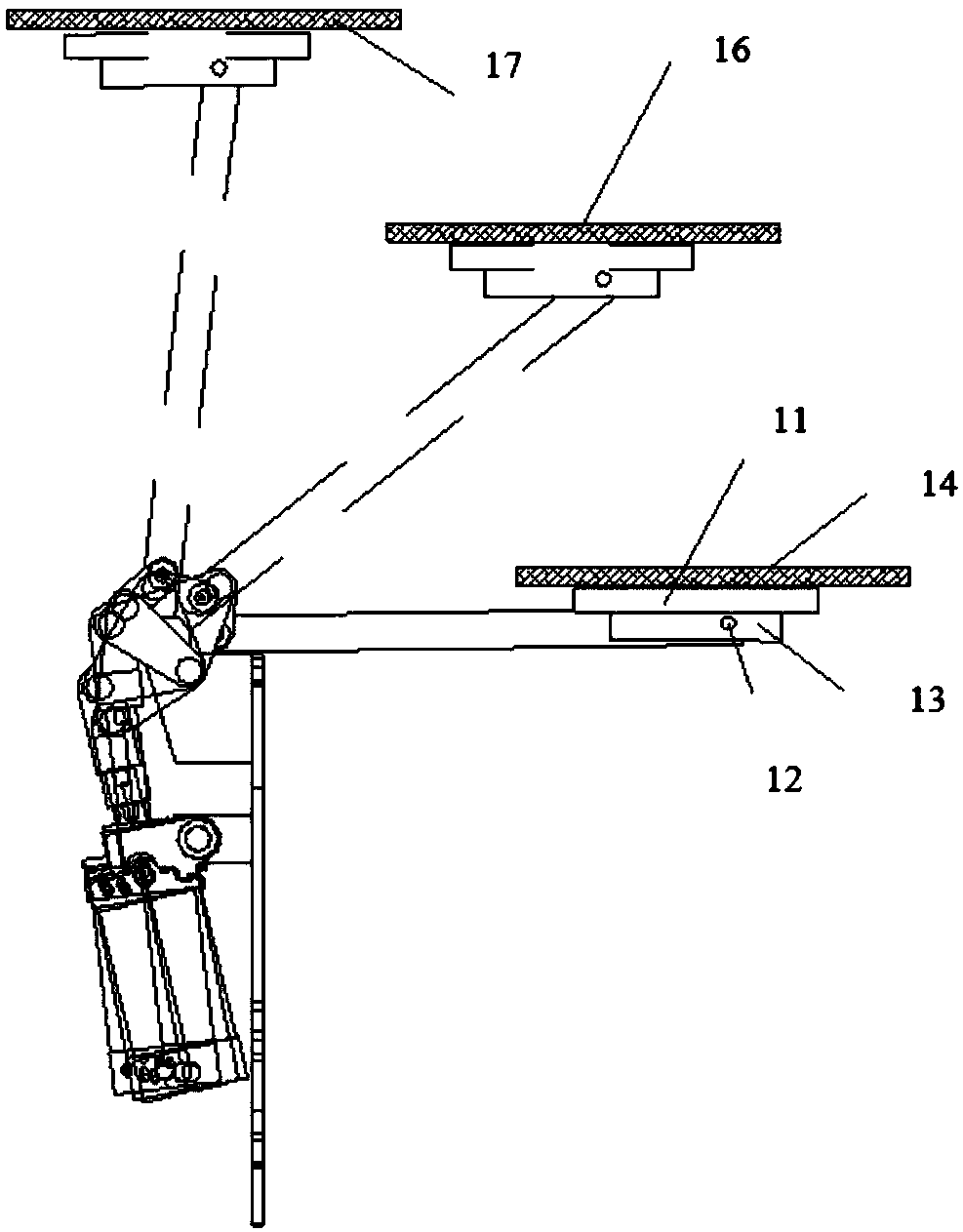
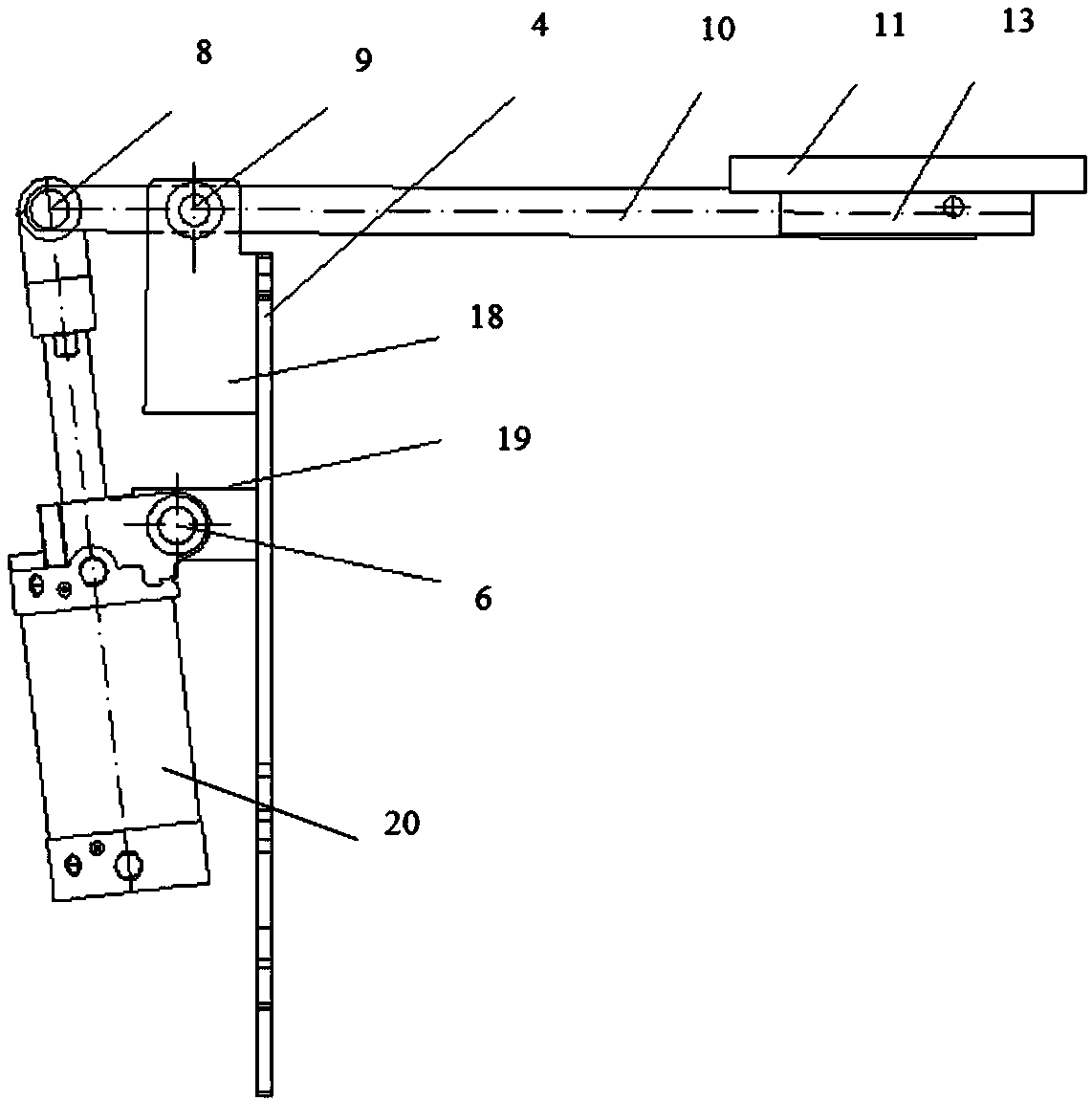
[0025] Attached below Figure 1-3 The pipeline dredging robot based on the support wall linkage mechanism and its use method of the present invention are described in detail.
[0026] A pipeline dredging robot based on a support wall linkage mechanism, the pipeline dredging robot includes a dredging cylinder 1, a telescopic cylinder 2, a front mounting plate assembly, a rear mounting plate assembly, a wall support rod assembly and a walking assembly; wherein, the Both the front mounting plate assembly and the rear mounting plate assembly include a connecting rod hinge seat 18 and a drive cylinder hinge seat 19, and the front mounting plate assembly also includes a front mounting plate 4; the rear mounting plate assembly also includes a rear mounting plate 21; The rod hinge seat is fixedly installed on the top of the installation plate, and the drive cylinder hinge seat is fixedly installed in the middle of the installation plate; Silt; the cylinder body of the telescopic cyli...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More