

Cross-shaped beam-type six-dimensional force sensor elastic body
A six-dimensional force sensor and elastic body technology, applied in the field of sensors, can solve the problems of inconsistent preload force, low sensor sensitivity, affecting repeatability, etc., and achieve the effect of reducing repeatability error, reducing inter-dimensional interference, and simple structure
Pending Publication Date: 2019-01-18
HEFEI UNIV OF TECH
View PDF2 Cites 4 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
However, the elastic beam of the existing six-dimensional force sensor is a solid beam structure, which leads to the problems of low sensitivity and low precision of the sensor; when this kind of elastic body is stressed, the strain generated on each elastic beam is approximately linearly distributed, while When actually using the resistance strain gauge for measurement, it is only necessary to ensure that there is sufficient strain at the sticking position of the strain gauge, and there is no requirement for other positions
[0004] Patent CN102853958B adopts the method of double cantilever elastic beams to detect the six-dimensional force sensor, but the structure of the sensor is not compact enough, and it is not suitable for the detection of the six-dimensional force sensor on the wrist of an industrial robot with limited space
Patent CN106225977A uses a one-way sensor to improve measurement accuracy. The elastic beam of the one-way sensor is a binocular structure, but the elastic body of this patent is a combined elastic body, so there are problems such as gaps and pre-tightening forces, which lead to the existence of six-dimensional force sensors. Large hysteresis effect, affecting repeatability, etc.
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
[0037] This embodiment adopts the first structure of the present invention.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
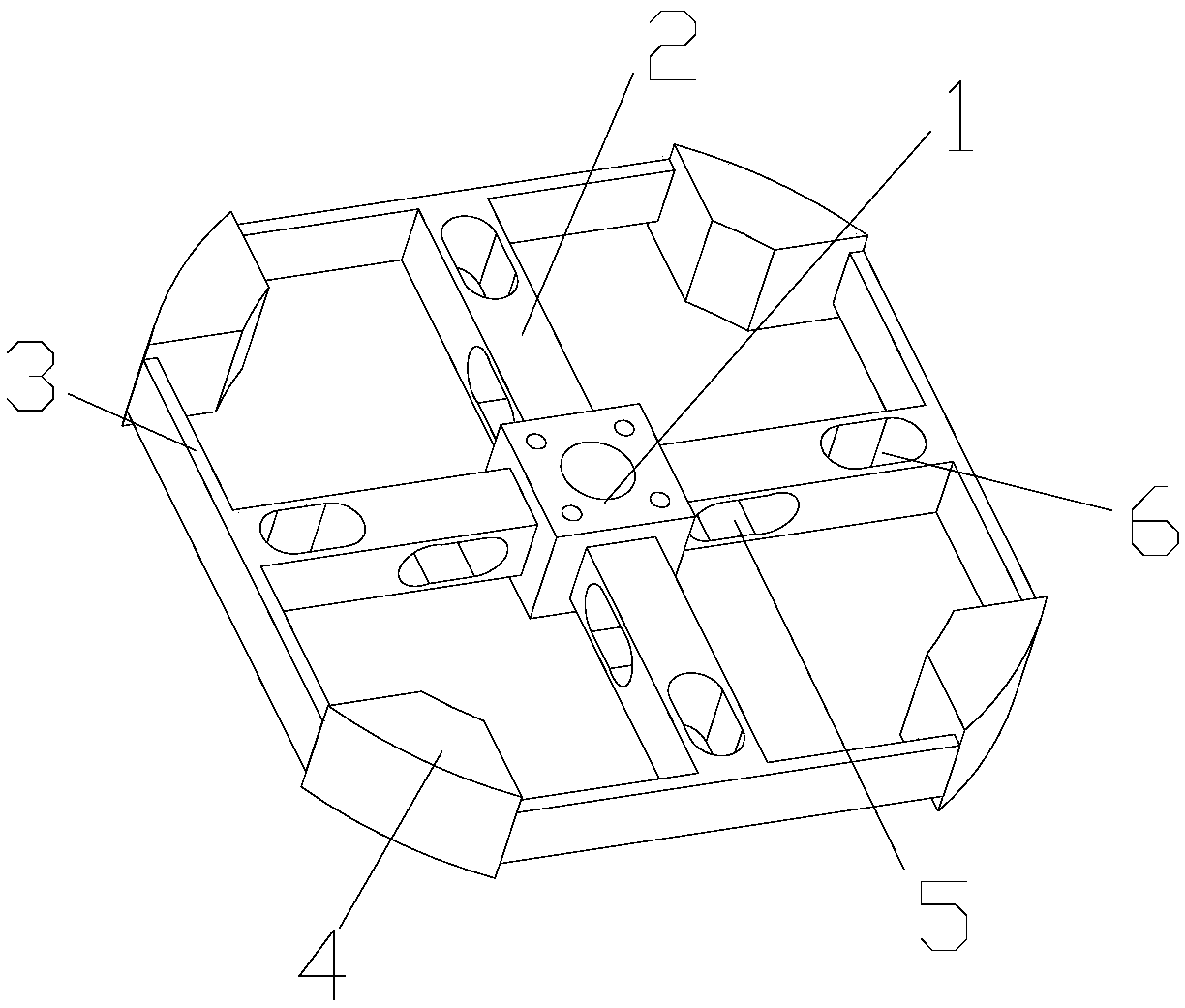
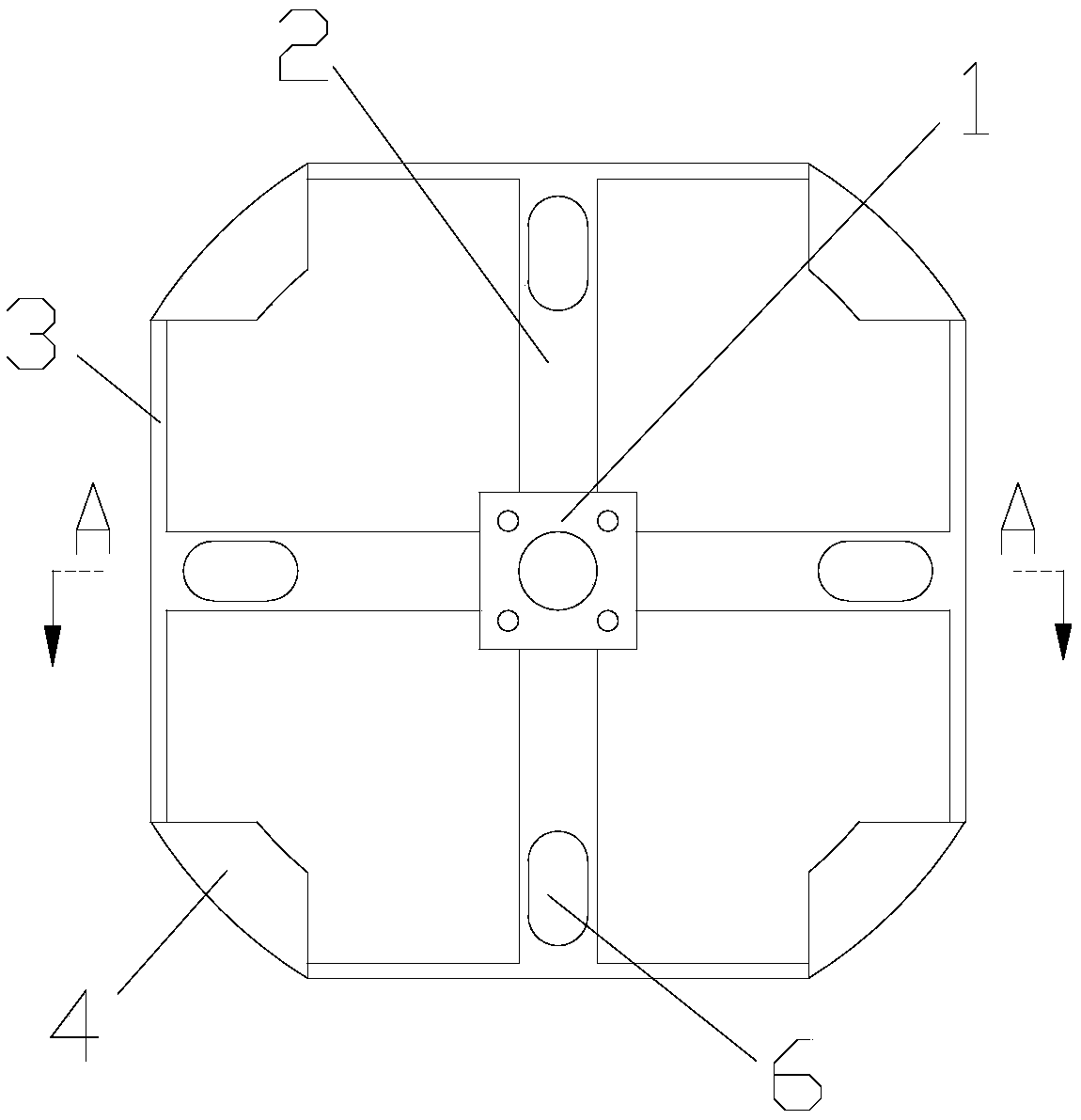
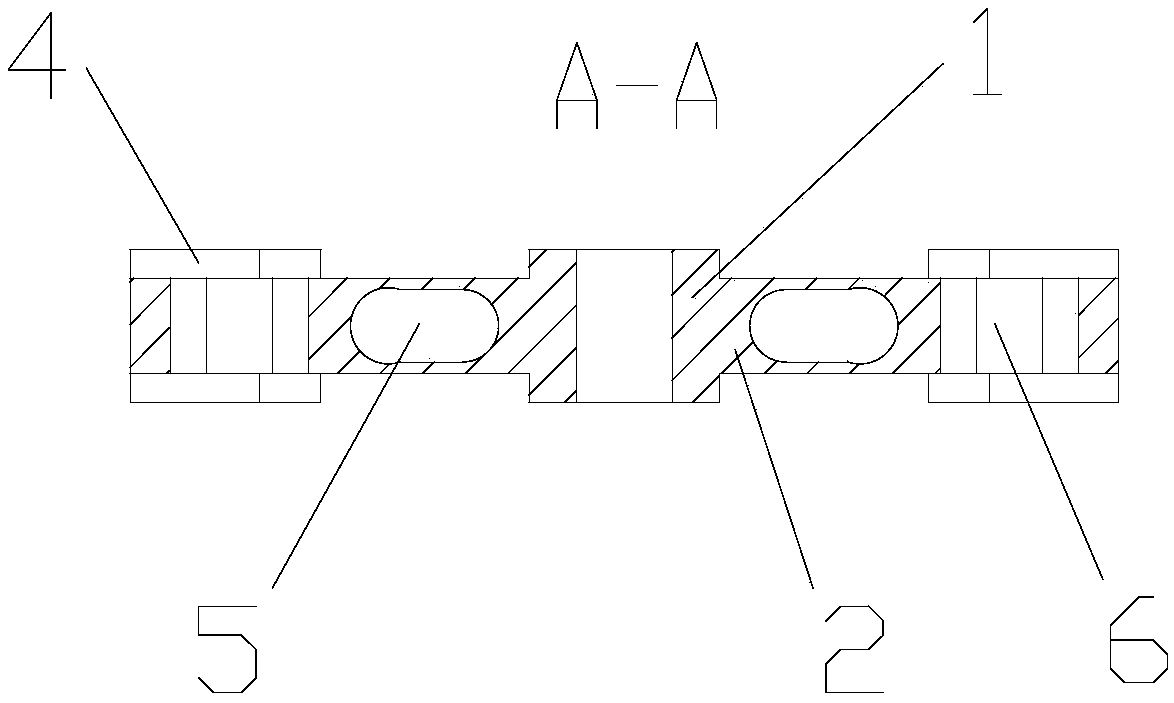
The invention discloses a cross-shaped beam-type six-dimensional force sensor elastic body, and relates to the technical field of sensors. Circumferential beams are connected to outer ends of radial beams to form T-shaped structured beam, each circumferential beam is circumferentially and uniformly arranged, the radial beams are arranged along a radial direction, a central table is arranged at a middle part of each beam and is connected with an inner end of each radial beam, each circumferential support is arranged between two adjacent beams and is fixedly connected with the circumferential beams at two sides, a vertical through hole is formed in each radial beam and penetrates through an upper surface and a lower surface of the radial beam, a horizontal through hole is formed in the radial beam and penetrates through two side surfaces, and strain gauges are arranged at two sides of the vertical through hole and the horizontal through hole. The horizontal through hole and the verticalthrough hole are formed in each radial beam, strain of the beam is concentrated at the two sides of the horizontal through hole or the vertical through hole, so that a resistance strain gauge is convenient to measure, the resolution of a sensor is effectively improved, and meanwhile, the rigidity of the sensor is ensured; with the adoption of a symmetric structure, the inter-dimension interferenceis effectively reduced; and the elastic body can be integrally processed, a repeated error is reduced, and the cross-shaped beam-type six-dimensional force sensor elastic body is simple in structureand is easy to process.
Description
technical field [0001] The invention relates to the technical field of sensors, in particular to an elastic body used for a six-dimensional force sensor. Background technique [0002] The multi-dimensional force sensor is an important source of information for the robot to obtain the force between the robot and the environment. At present, there have been many researches on multi-dimensional force sensors, such as the Watton multi-dimensional force sensor developed by the DraPer Institute in the United States, the SAFMS multi-dimensional force sensor jointly developed by the Hefei Institute of Intelligence of the Chinese Academy of Sciences and Southeast University, and the multi-dimensional force sensor based on the Stewart platform. Huang Xinhan The HUST FS6 multi-dimensional force sensor researched by the professor, the two-level parallel structure type six-dimensional force sensor designed by Dr. R. Seitner in Germany, etc. A lot of research has been done on multi-dimen...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityApplications(China)
IPC IPC(8): G01L1/22G01L5/16
CPCG01L1/2206G01L1/2287G01L5/161
Inventor王勇李春风胡珊珊吕仲明刘正士
OwnerHEFEI UNIV OF TECH