

Microgripper with claws of fiber Bragg gratings and gripping force self-sensing function
An optical fiber Bragg and clamping force technology, applied in the field of micro-clamps, can solve the problem that the clamping jaws cannot realize the clamping parts and clamping force self-sensing at the same time, so as to avoid electromagnetic interference, small resolution and high precision. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
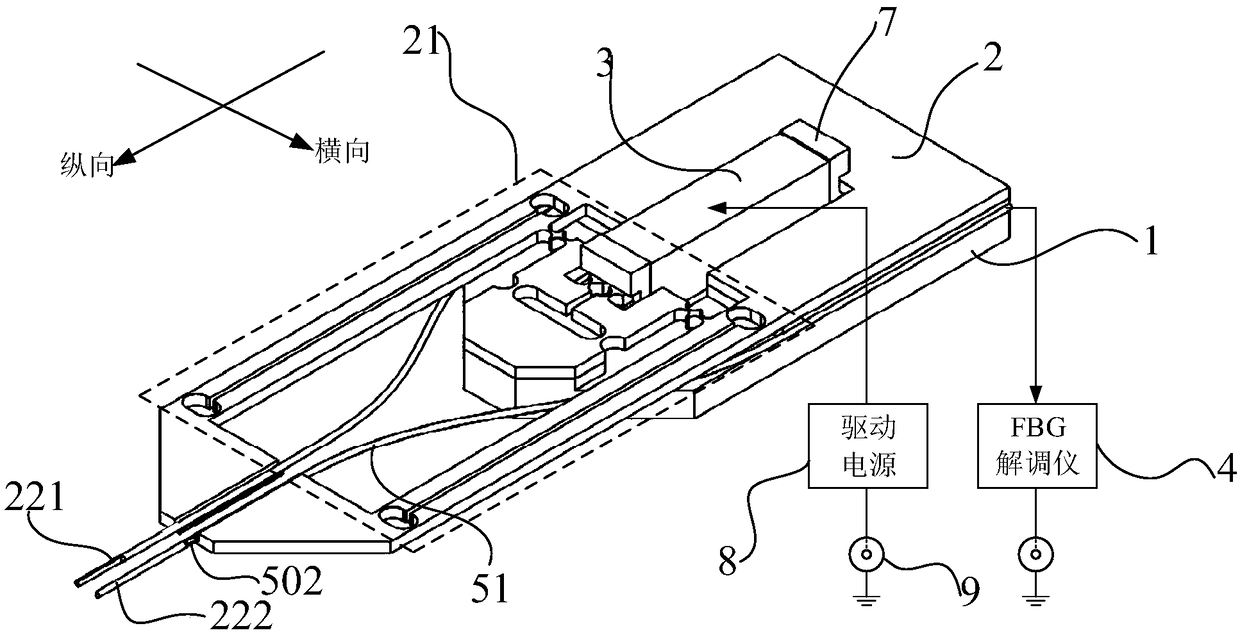
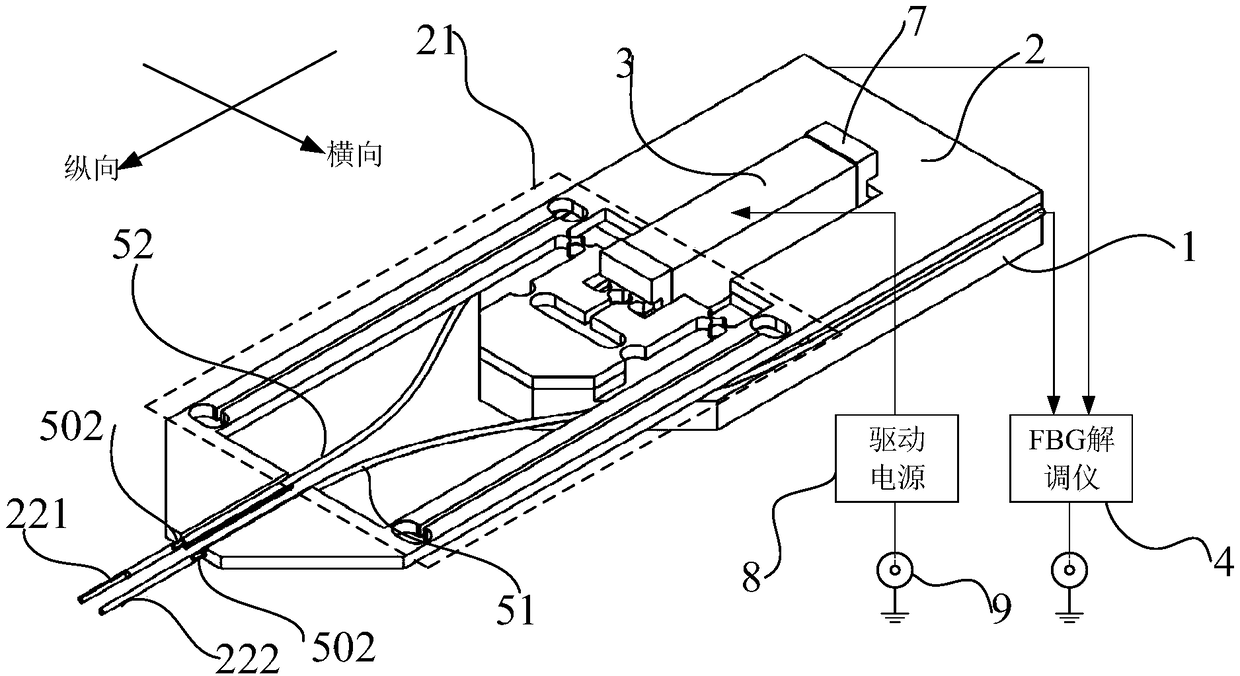
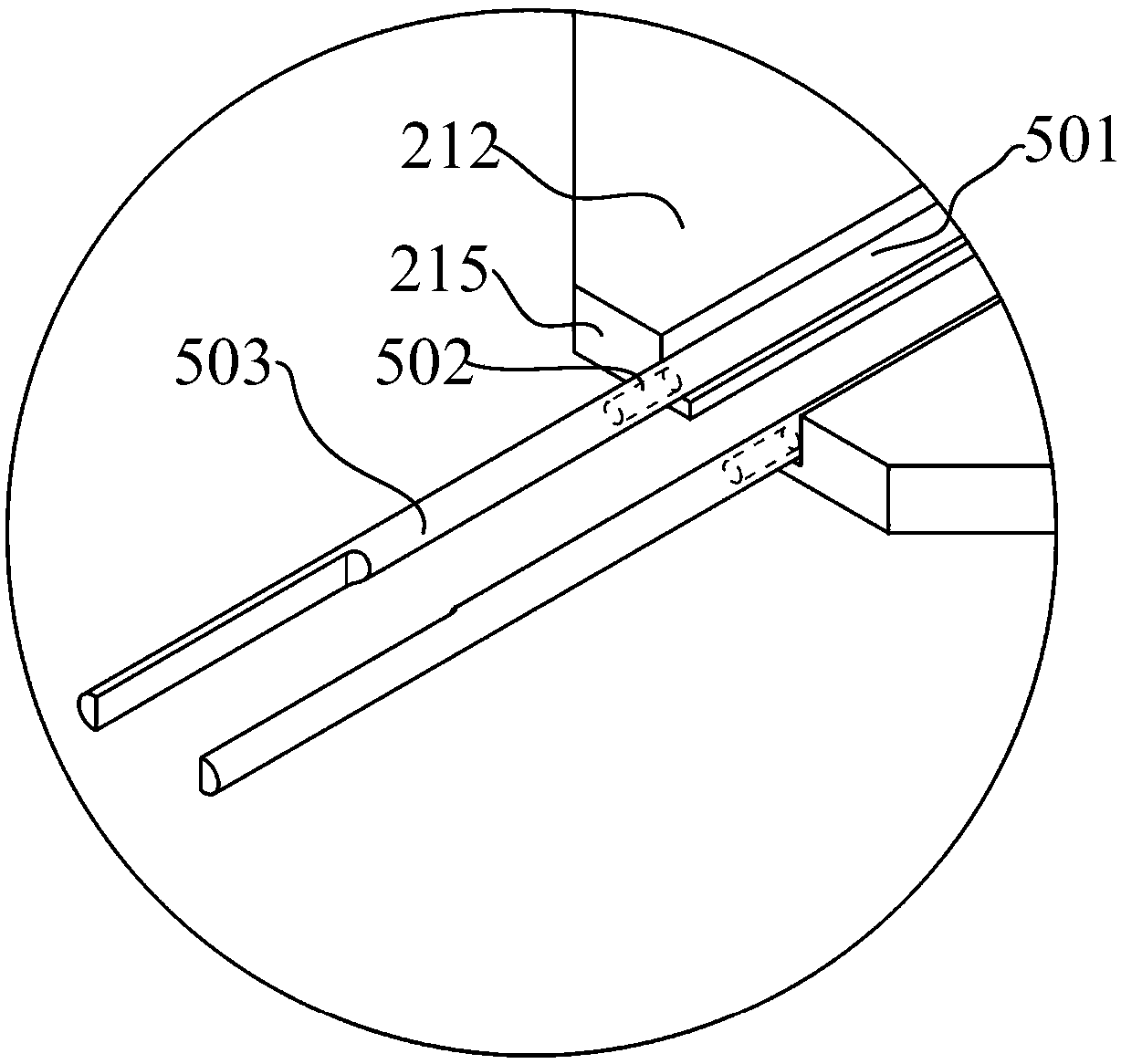
[0044] refer to Figure 1 to Figure 13 , a kind of micro-clamp with fiber Bragg gratings and self-sensing clamping force, comprising: a base 1, a single-piece flexible mechanism 2 fixed on the base, and a single-piece flexible mechanism installed on the single-piece flexible mechanism The actuator 3 in the cavity opened on the 2, the FBG demodulator (fiber Bragg grating demodulator) 4, and the controller connected to the actuator 3 and the FBG demodulator 4, the monolithic The flexible mechanism 2 includes: a displacement amplifying mechanism 21, the input stage 211 of the displacement amplifying mechanism 21 abuts against the actuator 3, and the two output stages 212 of the displacement amplifying mechanism 21 are respectively connected with a jaw; The micro gripper also includes: one or two first fiber Bragg gratings, one of the first fiber Bragg gratings corresponds to one gripper, and the first fiber Bragg grating includes: a clamping portion for forming the gripper And i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More