

Method for detecting obstacle of rubber tired crane at container port based on binocular vision
A technology of obstacle detection and binocular vision, which is applied to the interpretation of photos, etc., can solve problems such as maintenance difficulties, large labor costs, and inaccurate calculations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
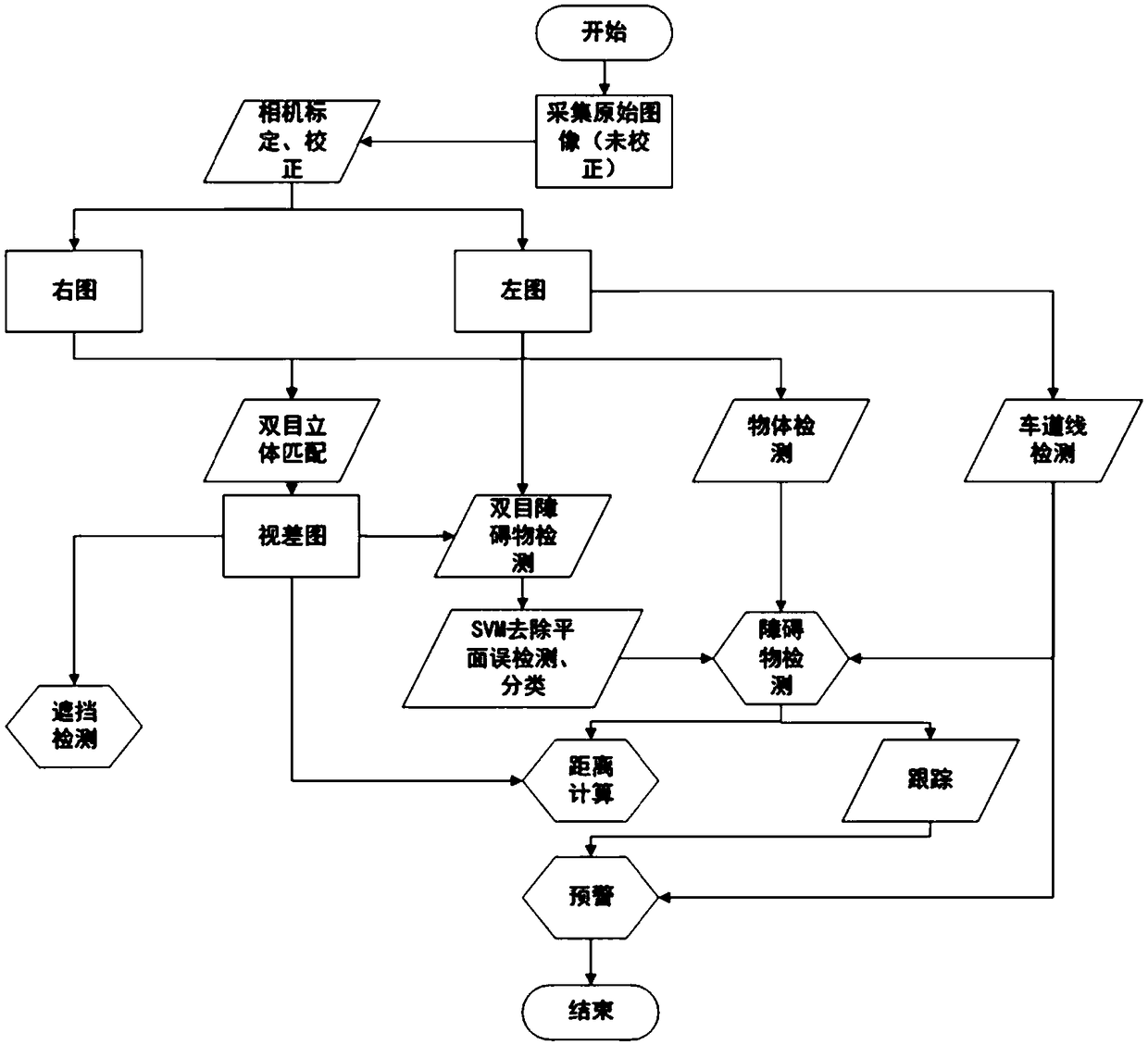
[0084] In order to make this system work better, first install the camera as required before. For the convenience of this embodiment, the same type of camera is used, and they are all fixed-focus cameras. The reason for fixed focus is to use the binocular model by parallax Calculate the distance to the obstacle. After the installation is completed, the left and right cameras are calibrated using the calibration board of Zhang’s calibration method to obtain the internal parameter I1 of the left camera and the internal parameter I2 of the right camera respectively. The resolutions of the left and right images collected in the embodiment are both 1280*960 pixels. In order to speed up the running speed of the program, except for the correction and disparity map, the resolution of 960*540 pixels is used, and all other functions are calculated at the resolution of 640*480 pixels.
[0085] Afterwards, this example performs stereo correction on the data collected by the binocular cam...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More