

Integrated parameter estimation method for attitude and orbit of a spatial non-cooperative target based on depth learning
A non-cooperative target and parameter estimation technology, which is applied in the field of attitude-orbit integration parameter estimation of space non-cooperative targets based on deep learning, can solve problems such as over-fitting, and achieve generalization and robustness Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
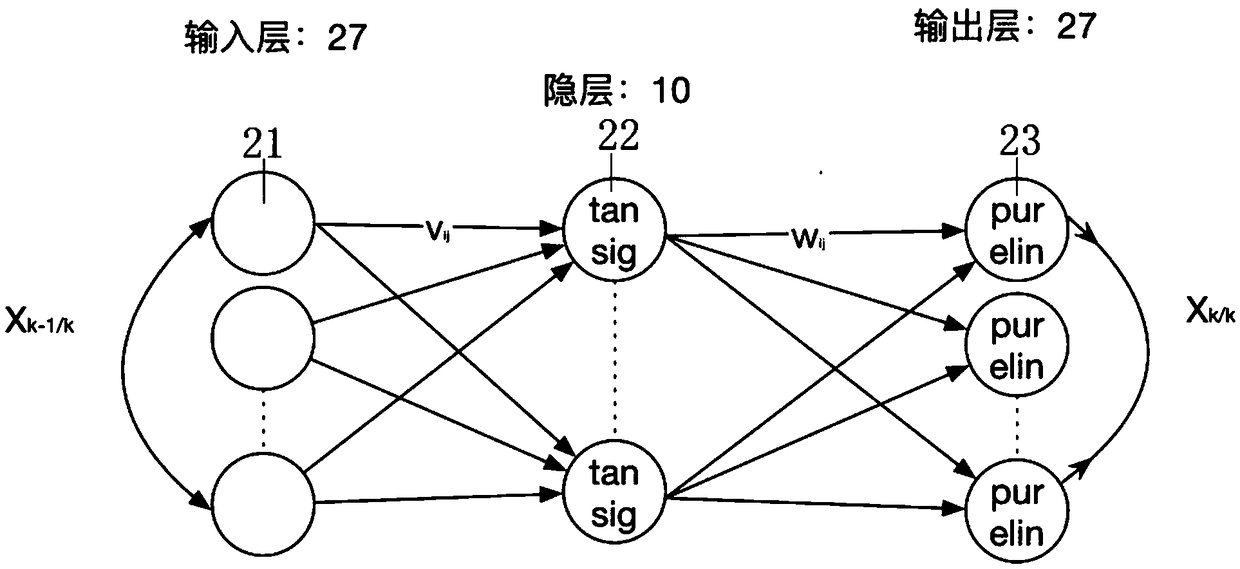
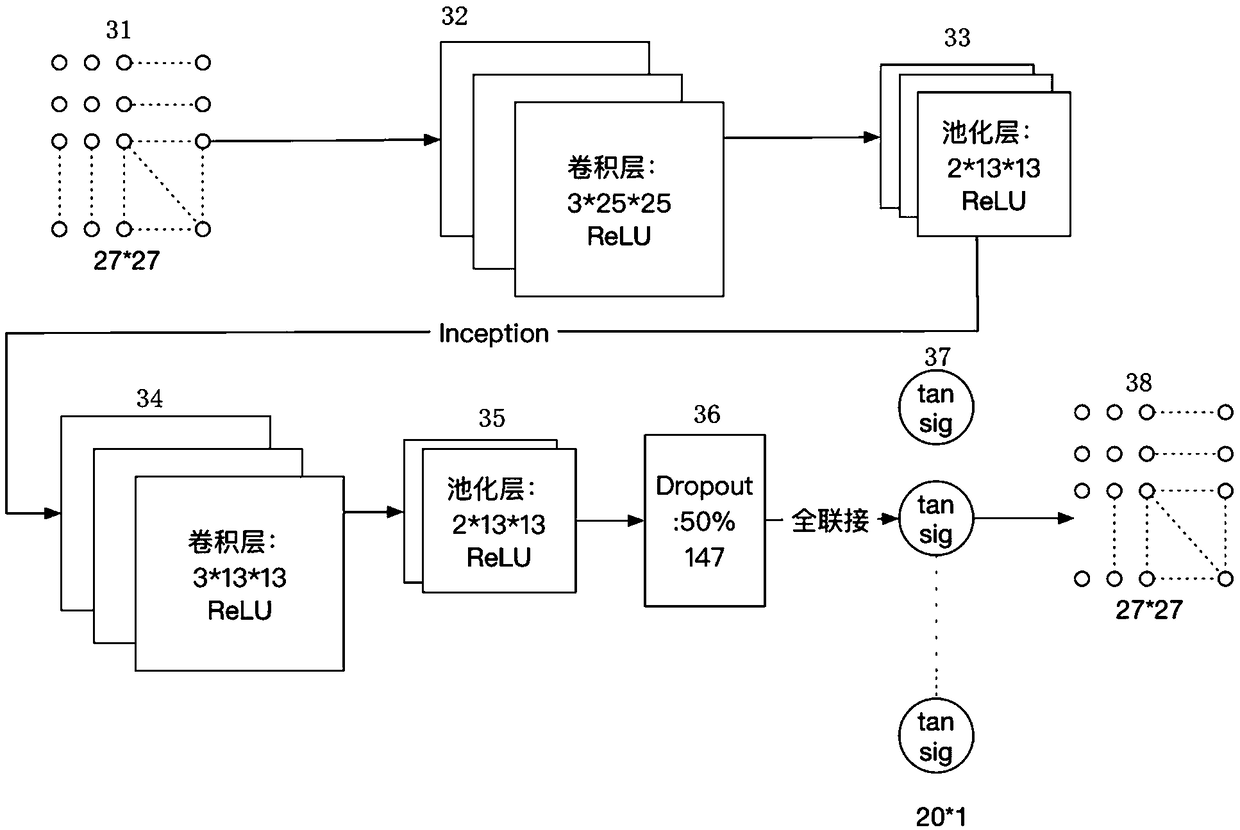
[0040] The present invention is a space non-cooperative target attitude-orbit integration parameter estimation method based on deep learning, which is a hybrid parameter estimation method. When the measurement information of the measurement sensor of the serving spacecraft about the space non-cooperative target is valid, the serving spacecraft uses the traditional extended Kalman filter algorithm to estimate the parameters of the space non-cooperative target; When the measurement information of the cooperative target fails, the service spacecraft uses a deep learning-based method for estimating the parameters of the space non-cooperative target to estimate the parameters of the space non-cooperative target. At the same time, the estimated result is used to reset the extended Kalman filter.
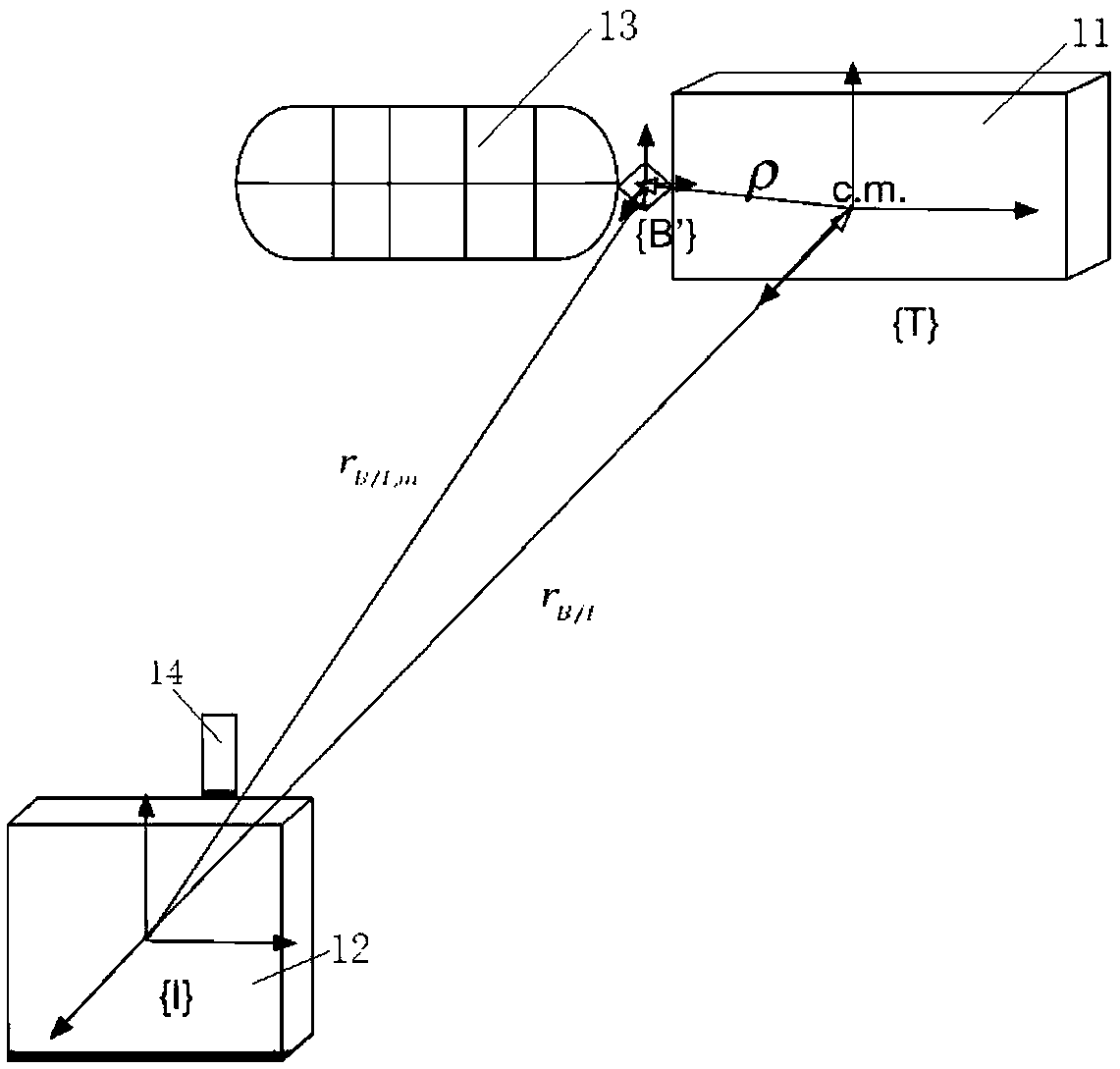
[0041] Specifically, the kinematics and dynamics modeling method of the space non-cooperative target considering the chance of the inertia product of the dual vector quaternion uses the du...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More