

Fire fighting robot fire monitor control method based on fire source positioning and recognition
A fire-fighting robot, positioning and identification technology, applied in fire rescue and other directions, can solve problems such as low efficiency, insufficient environmental information, and long adjustment time for unmanned fire-fighting robot fire monitor control, so as to improve efficiency, suppress fire, and make up for work efficiency. low effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] Embodiments of the present invention will be described below in conjunction with the accompanying drawings.
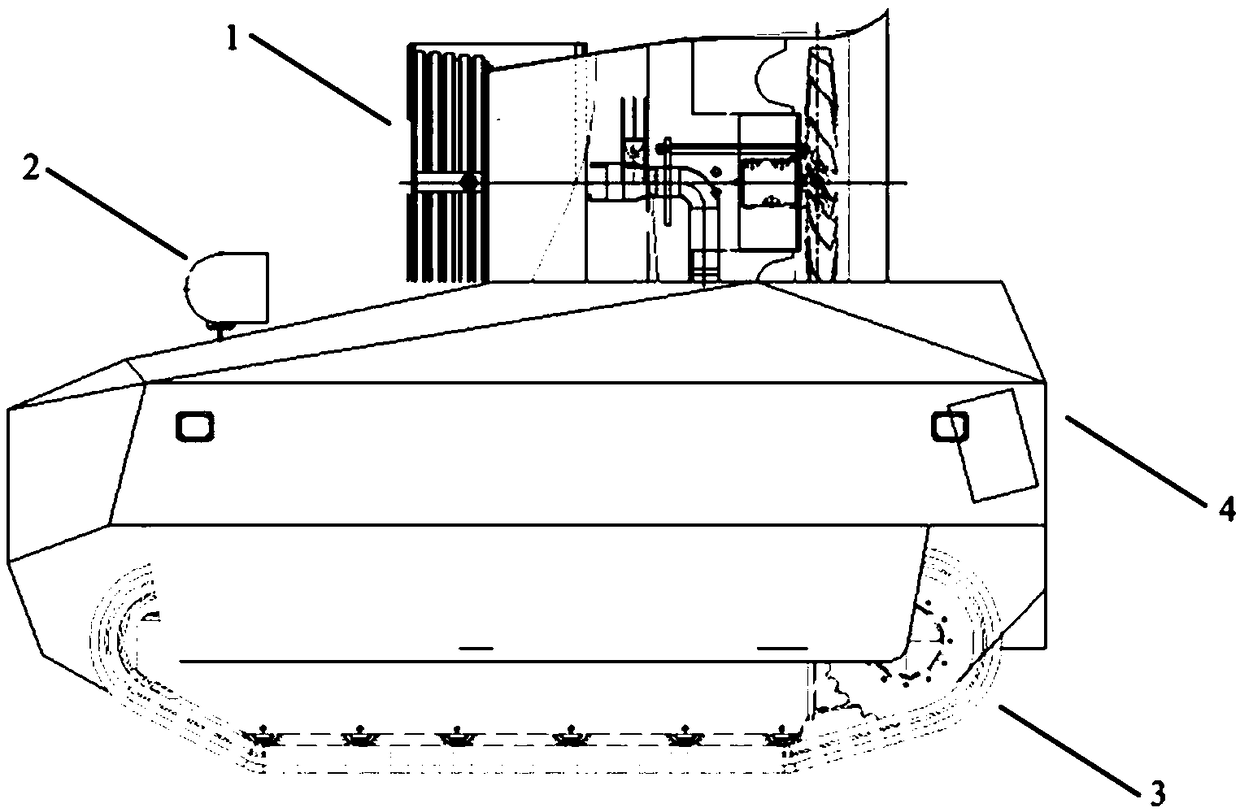
[0032] The present invention has designed a kind of fire-fighting robot fire cannon control method based on fire source location identification, and the structure of fire-fighting robot in the present embodiment is as follows figure 1 As shown, the fire-fighting robot includes a fire-fighting robot body 4, a fire cannon 1 with a two-axis pan-tilt, a binocular infrared camera 2, and a fire-fighting robot crawler 3. In order to realize the farthest range of fire source positioning, the binocular infrared camera 2 can Including two left and right infrared cameras symmetrically arranged, respectively placed on both sides of the fire robot body; the two-axis pan-tilt is set on the fire robot body, and connected to the fire monitor, which has great uncertainty for the operator to adjust the fire monitor Due to defects such as flexibility and long adjustment time, the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More