

Indoor positioning method based on adaptive non-trace Kalman filtering
An unscented Kalman, indoor positioning technology, applied in measurement devices, instruments, surveying and navigation, etc., can solve problems such as poor positioning results, poor filtering effects, and large deviations in estimated results.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] The technical solutions and beneficial effects of the present invention will be described in detail below in conjunction with the accompanying drawings.
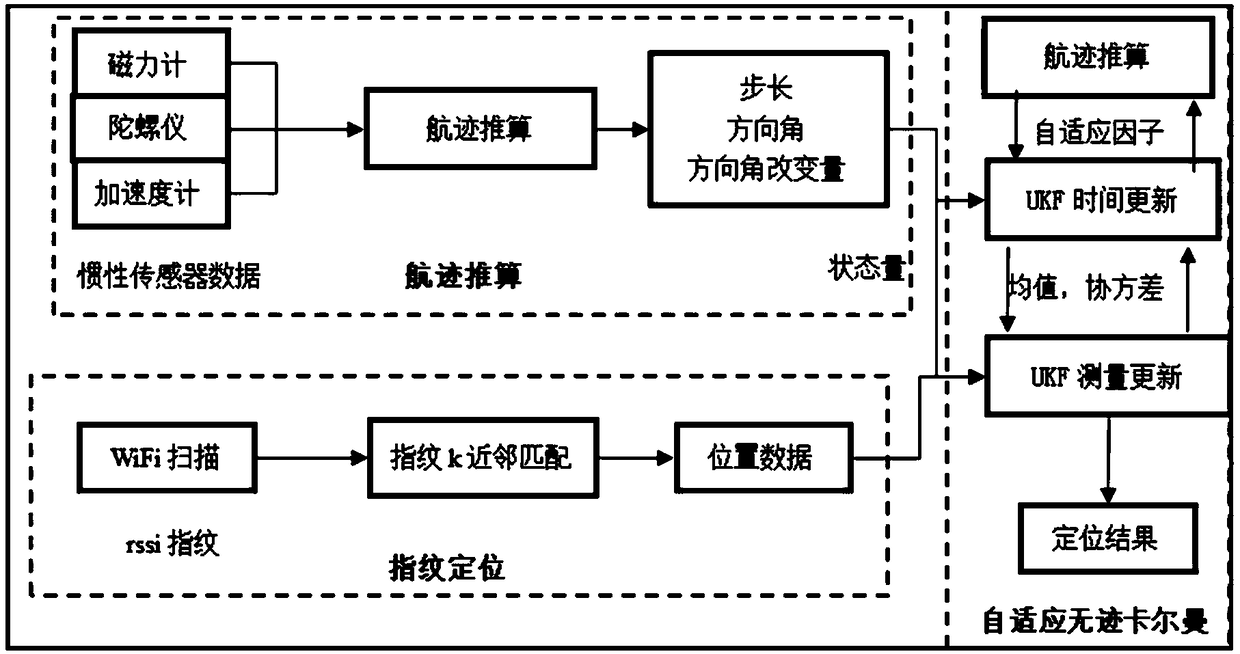
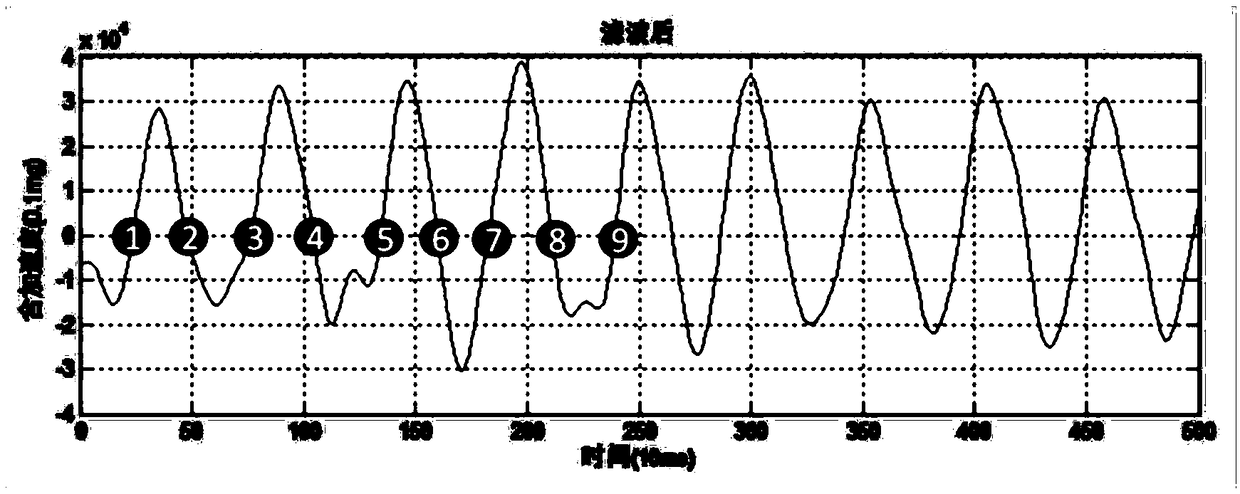
[0062] Such as figure 1 As shown, the indoor positioning based on the adaptive unscented Kalman filter algorithm includes three parts, which are dead reckoning, fingerprint positioning and adaptive unscented Kalman. Dead reckoning obtains step frequency through zero-crossing detection, which is used for step length calculation; integrates sensor data through heading detection algorithm to obtain direction angle. Fingerprint positioning is realized through two steps of offline fingerprint collection and online fingerprint matching. Adaptive unscented Kalman establishes a model by integrating the results of dead reckoning and fingerprint positioning, and corrects the noise parameters in the model to achieve positioning.
[0063] ●Dead reckoning
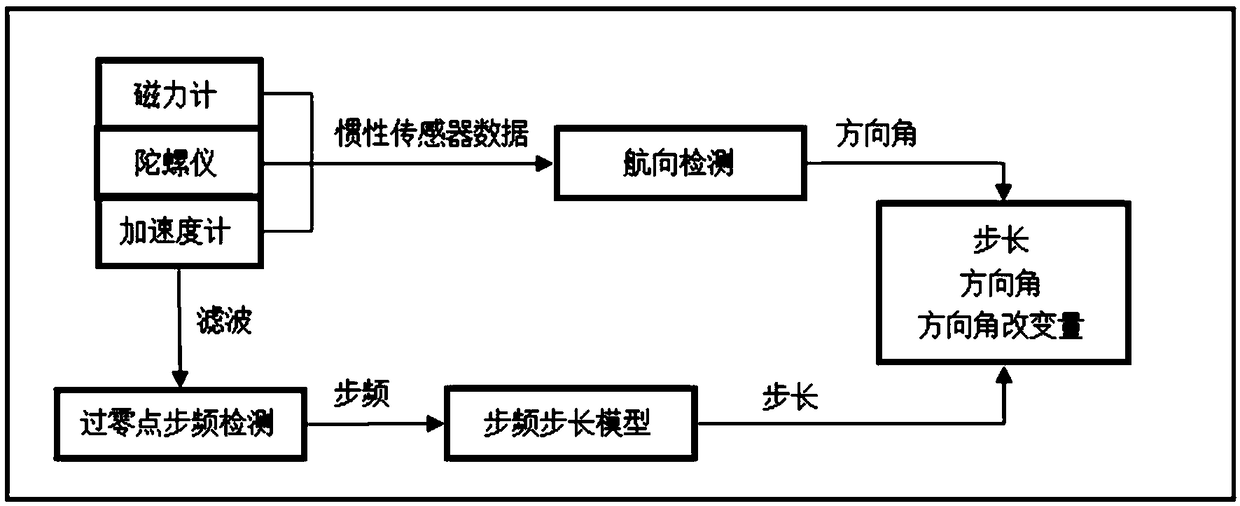
[0064] The dead reckoning part is divided into three parts, such as f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More