

Dynamic trajectory planning method for performing obstacle avoidance and overtaking based on lane line parallel shift
A trajectory planning and lane line technology, applied in vehicle position/route/height control, motor vehicle, non-electric variable control and other directions, can solve problems such as difficult planning, difficult planning of smooth connection paths, and unsuitable trajectory planning for unmanned driving. , to achieve the effect of ensuring safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
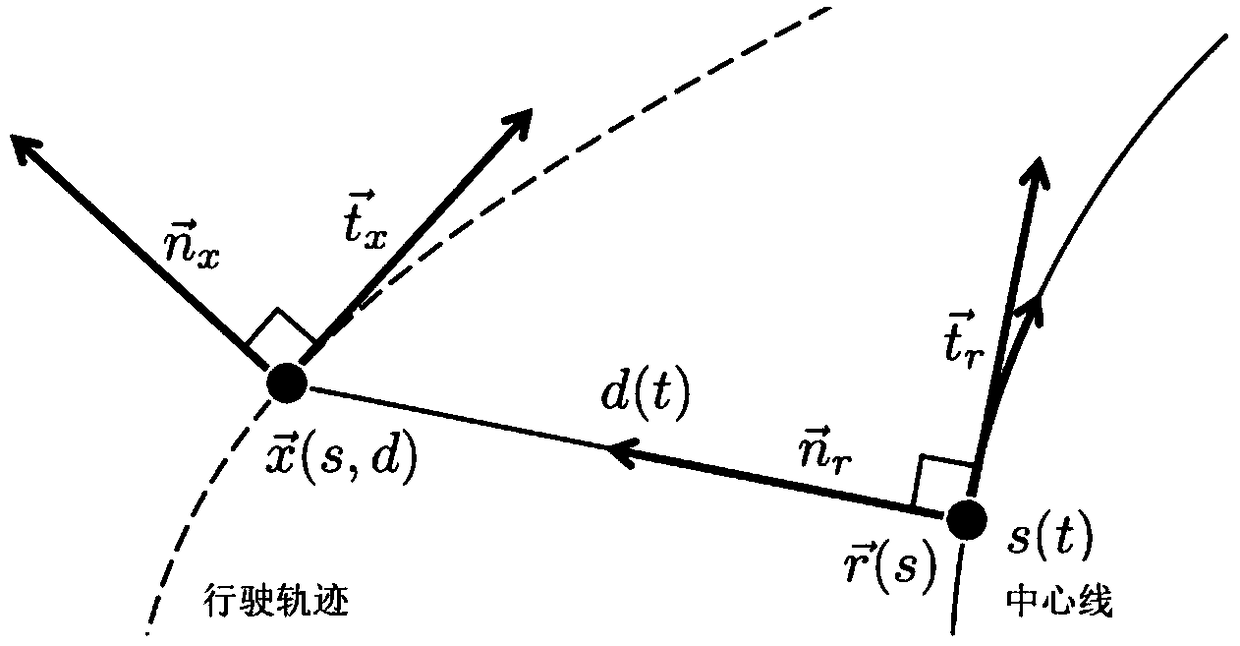
[0094] The coordinate conversion and decoupling of the present invention are for the convenience of the follow-up trajectory planning in the two axes, and provide great convenience for the follow-up control process, so the trajectory planning can be completed more accurately and efficiently, and the actual trajectory planning is to use A quintic polynomial proceeds.
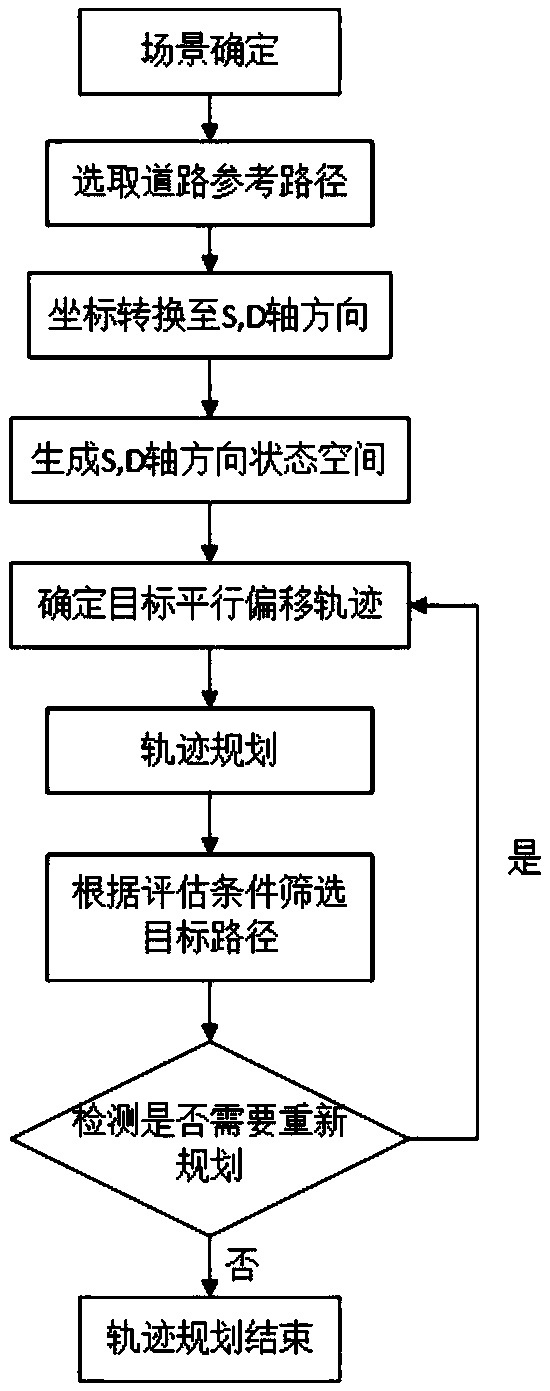
[0095] Step 1, scene definition. Select the corresponding reference path according to the road scene. The present invention relates to three application scenarios, which are: 1) a fixed path in an open environment; 2) a structured road without lane lines and only with road boundary lines; 3) with multiple Structured roads with parallel lanes.
[0096] According to the above three scenarios, select a fixed path as the trajectory planning reference path, for scenario 1) select the fixed driving path in the environment as the reference path; for scenario 2) locate the road centerline according to the road boundary ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More