

Route planning safety assessment method for unmanned aerial vehicle
A technology for route planning and drones, applied in navigation computing tools, etc., can solve problems such as excessive redundancy, waste of resource costs, and increased range of drones
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
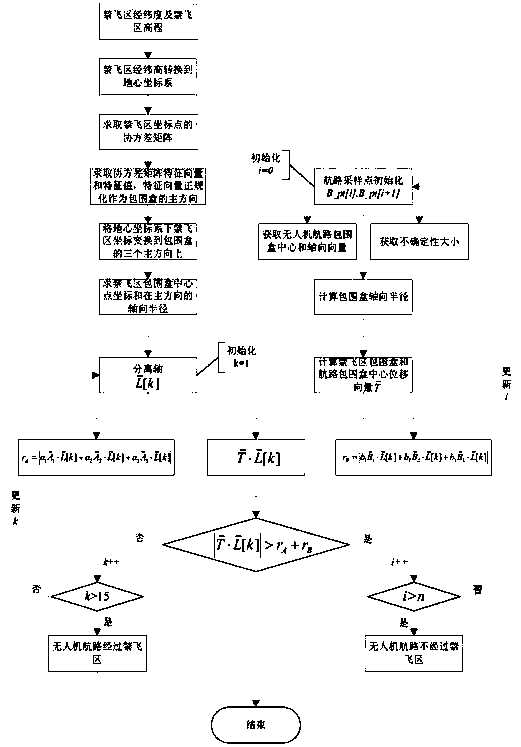
[0087] 1) No-fly zone OBB bounding box (Oriented Bounding Box, direction bounding box) structure
[0088] (1) No-fly zone bounding box modeling
[0089] The shape of the no-fly zone is figure 1 As shown, the boundary points of the region are represented by latitude and longitude heights, so it is necessary to convert 2n boundary points to the geocentric coordinate system through coordinate transformation, and the boundary points on the bottom surface ( figure 1 Middle black circle) is converted by the following formula:
[0090]
[0091] Boundary points on the top surface ( figure 1 Middle black triangle) is converted by the following formula:
[0092]
[0093] Among them, B i is the geocentric latitude of the i-th point on the bottom of the no-fly zone, L i is the longitude of the i-th point on the bottom of the no-fly zone, R is the radius of the earth, and h is the elevation of the no-fly zone.
[0094] The coordinate mean of the above 2n coordinate points is as...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More