Following system and following method based on UWB
A technology for transmitting and receiving objects, applied in location information-based services, electrical components, wireless communications, etc. It can solve the problems of not being concise and accurate in the calculation of the distance and deflection angle of the following target, and the high cost of the following system, so as to achieve reliable measurement and simplified algorithm Efficient and good user experience effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment 1
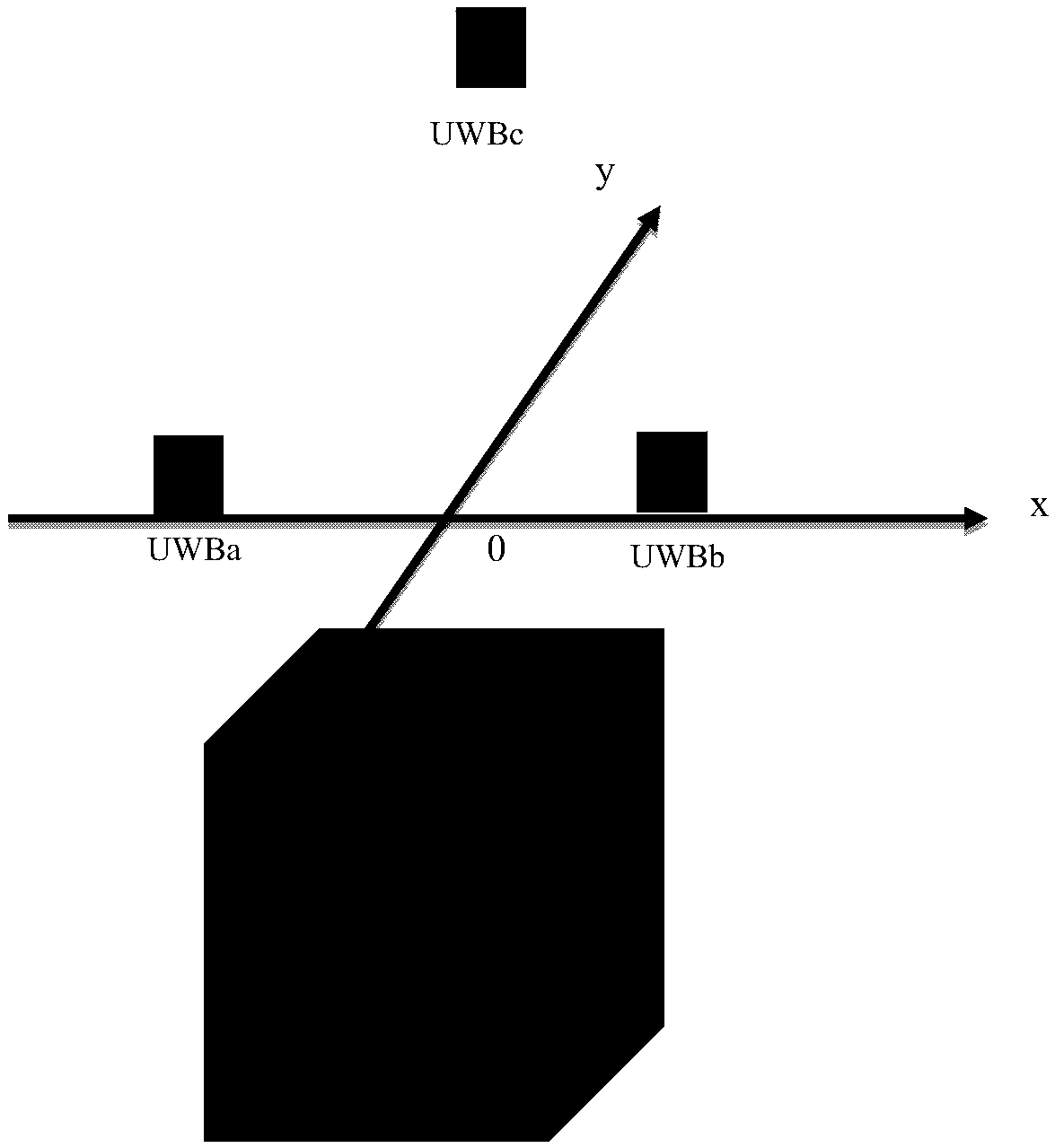
[0064] When the projection of the first UWB transmitting and receiving module on the reference surface is located on the left side of the y-axis: According to the law of cosines, calculate ∠θ:
[0065]
[0066] According to the law of cosines, calculate d:
[0067]
[0068] According to the law of cosines, calculate ∠β 1 :
[0069]
[0070] According to the arccosine formula, we get ∠β 1 = arccos(m);
[0071] According to the triangle relation, get ∠α=∠β 1 -90°;
[0072] Simplified to get:
specific Embodiment 2
[0073] When the projection of the first UWB transmitting and receiving module on the reference plane is located on the right side of the y-axis: According to the law of cosines, calculate ∠θ:
[0074]
[0075] According to the law of cosines, calculate d:
[0076]
[0077] According to the law of cosines, calculate ∠β 2 :
[0078]
[0079] According to the arccosine formula, we get ∠β 2 = arccos(m);
[0080] According to the triangle relation, get ∠α=90°-∠β 2 ;
[0081] Simplified to get:
specific Embodiment 3
[0082] When the projection of the first UWB transmitting and receiving module on the reference plane falls on the y-axis:
[0083] According to the triangle relationship, we get ∠α=0°,
[0084] The first UWB transmitting and receiving module detects the movement information of the target object through the speed sensor and the three-axis acceleration sensor, and transmits the movement information to the second and third UWB transmitting and receiving modules, and controls the acceleration, deceleration or constant speed of the following object through the control unit , to keep the following object at a set distance from the target object.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com