

Walking automatic fruit picking collection robot
An automatic picking and walking technology, used in picking machines, harvesters, agricultural machinery and implements, etc., can solve the problems of high staff requirements, high labor intensity, economic losses, etc., and achieve simple and convenient collection methods. The effect of reducing friction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
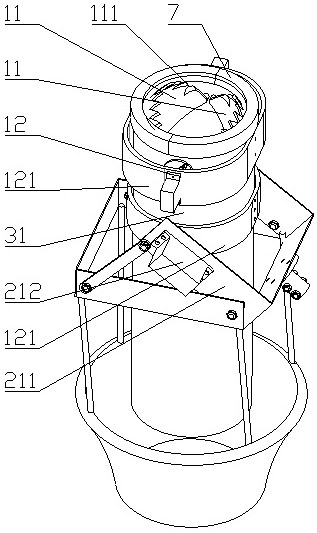
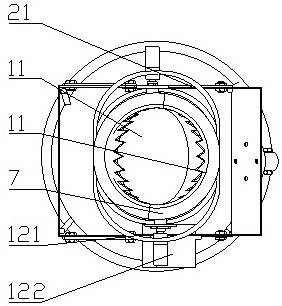
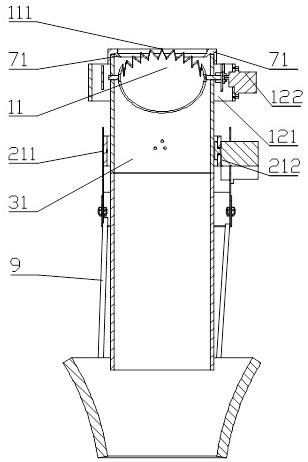
[0044] Embodiment one: combined with attached figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 , Image 6 , Figure 7 and Figure 8 , electric fruit picking head, including picking head 1; said picking head 1 includes arc-shaped cutter 11 and driving mechanism 12; The outer end of the structure is connected with the output rotating shaft of the drive mechanism 12, so that the cutter 11 is driven by the drive mechanism 12 to realize the rotation around the axis; the tail ends of the two cutters 11 are relatively rotated and Combine to form a receiving tray structure to realize the lifting of the fruit; and then realize the cutting of the fruit stem through the relative rotational movement of the cutter heads 111 of the two cutters 11. In this solution, by using the arc-shaped cutter 11, the fruit can be covered and fixed before cutting the fruit stem, that is, the fruit can be positioned, and the fruit stem can be cut accurately, and the two relative knife heads c...
Embodiment 2
[0059] Embodiment two: combined with attached figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 , Figure 7 , Figure 9 , Figure 10 and Figure 11 , walking type fruit automatic picking collection robot, comprises picking head 1, positioning mechanism 2, collecting mechanism 3, moving mechanism 4; Said picking head 1 comprises arc cutter 11 and drive mechanism 12; The head of two said cutters 11 The end arc-shaped cutter heads 111 are arranged oppositely; the outer end of the arc-shaped structure of the cutter 11 is connected to the output rotating shaft of the drive mechanism 12, so that the cutter 11 is driven by the drive mechanism 12 to realize rotation around the axis; The tail ends of the two cutting knives 11 are relatively rotated and combined to form a receiving tray structure to realize the lifting of the fruit; and then through the relative rotational movement of the cutter heads 111 of the two cutting knives 11, the fruit is realized. The shearing of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More