

Leg muscle trainer and control method thereof
A control method and technology of a training device, applied in the field of muscle training devices and its control, can solve the problems of unfavorable rehabilitation training for patients and high space requirements for venues, etc., facilitate large-scale popularization and use, promote blood circulation in legs, and have a simple structure Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
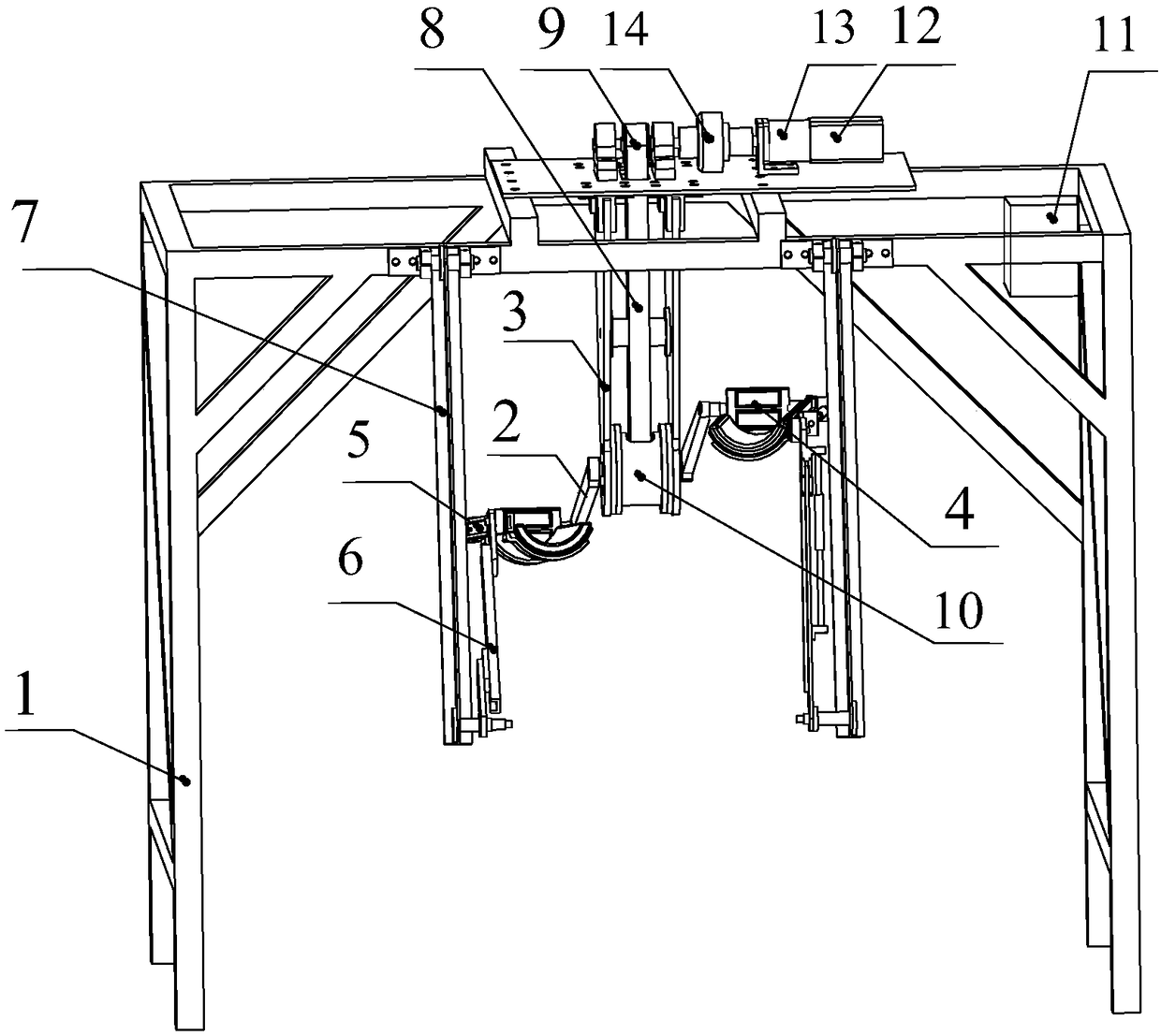
[0021] Such as figure 1 , a leg muscle training device, including an external frame 1, crank 2, crank shaft bracket 3, pedal 4, connecting rod 5, rocker 6, rocker bracket 7, timing belt 8, the first timing pulley 9, the first Two synchronous pulleys 10, a controller 11, a servo motor 12, and a servo driver 13; the outer frame 1 is a hollow structure, and its bottom can be erected on a plane, and the controller 11, the servo motor 12, and the servo driver 13 are all fixed On the top of the outer frame 1, the servo driver 12 is connected with the controller 11 and the servo motor 13 respectively, the servo motor 13 is connected with the first synchronous pulley 9, the crank 2 is connected with the second synchronous pulley 10, and the crankshaft support 3 is connected with the first synchronous pulley 9 respectively. The crank 2 is fixedly connected with the outer frame 1, the first synchronous pulley 9 is connected with the second synchronous pulley 10 through the synchronous b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More