

An underwater autonomous operation robot and its operation method
A kind of working robot and robot technology, applied in underwater operation equipment, transportation and packaging, ships, etc., can solve the problems of low detection efficiency, difficulty in achieving full coverage detection, and entanglement by cables, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
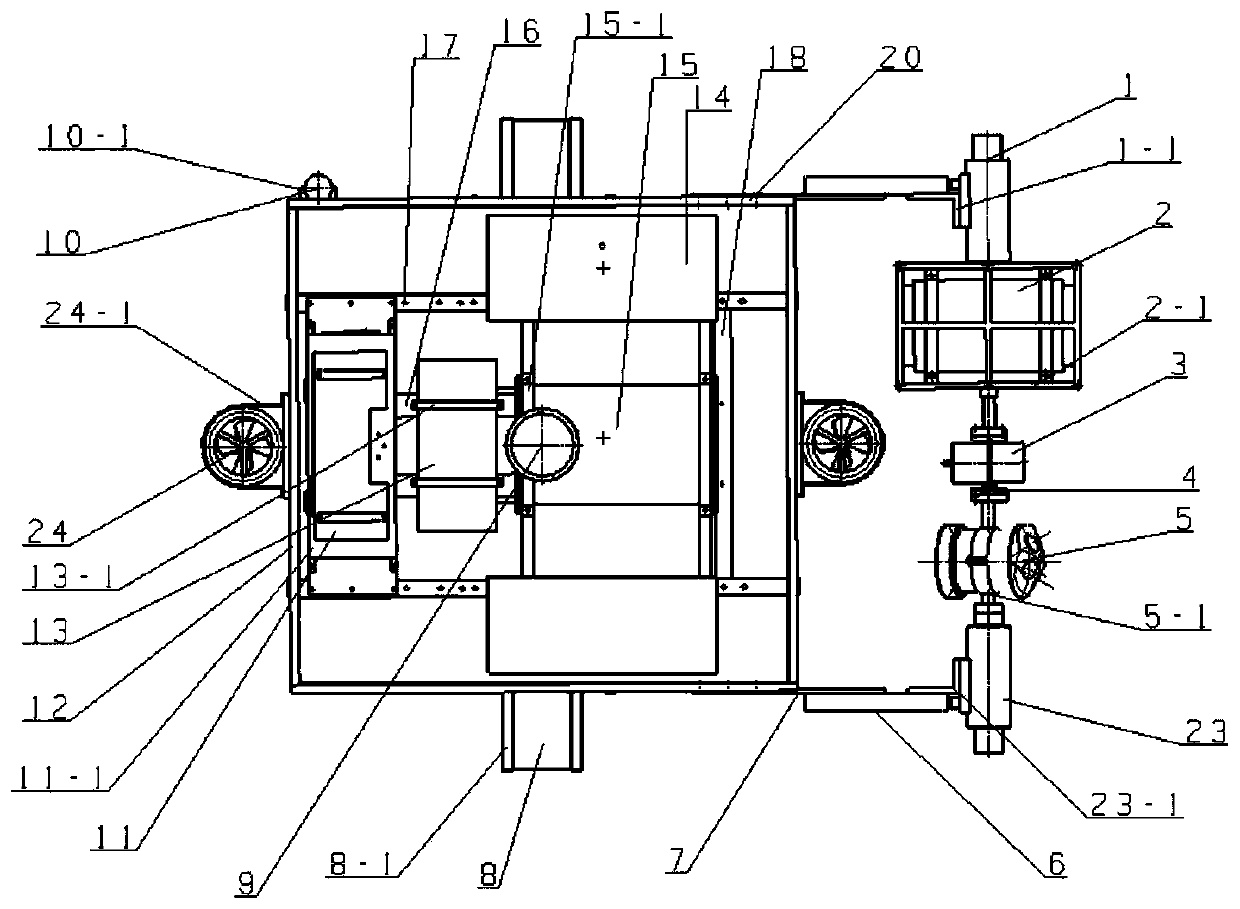
[0055] The present invention is an underwater autonomous operation robot for acoustic and optical detection of various underwater working surfaces. The embodiments of the present invention will be described in detail below with reference to the accompanying drawings, and the specific implementation modes of the present invention will be further described.
[0056] It should be noted that the words indicating orientation used in the present invention are only for the convenience of expression, and they only indicate the relative positional relationship between different components at a certain viewing angle, and do not mean the absolute positional relationship of specific components . For example, refer to figure 1 , the front end and the back end in the present invention respectively correspond to figure 1 The upper end and the lower end of the underwater autonomous operation robot, the left and right sides in the present invention, then respectively correspond to figure 1 T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More