

Dynamic constraint combined human body inertia parameter identification method
A technology of inertial parameters and identification methods, applied in the field of human body inertial parameter identification combined with dynamic constraints, can solve the problems of inertial parameter identification results that are difficult to approach the real value, missing constraints, etc., to achieve clear calculation process and improve accuracy , to avoid the effect of direct measurement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The present invention will be further elaborated below through specific embodiments in conjunction with the accompanying drawings.
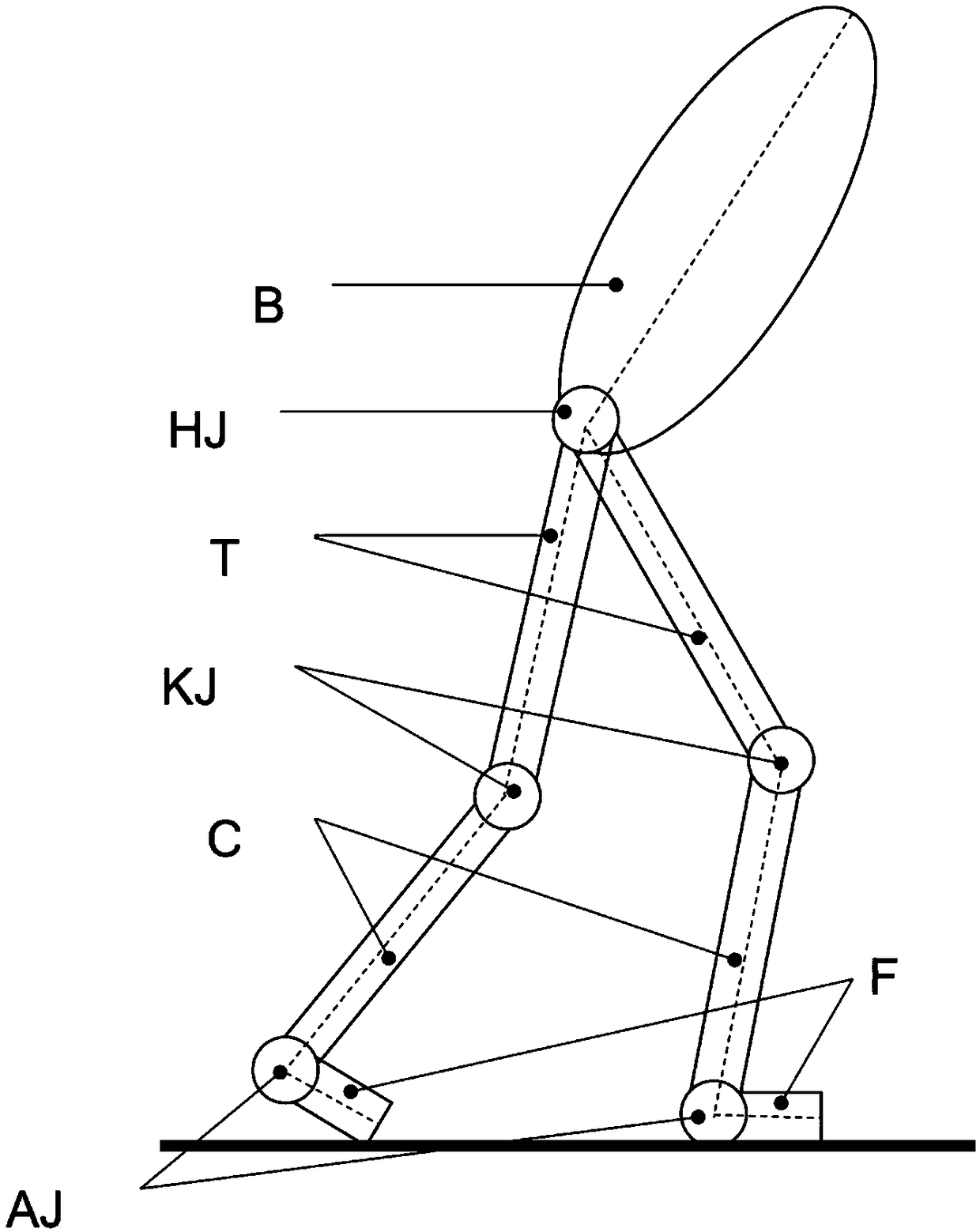
[0046] Such as figure 1 As shown, in this embodiment, the human body is simplified into a multi-segment rigid body model composed of seven rigid bodies, including torso B, double thigh T, double Calf C and feet F.
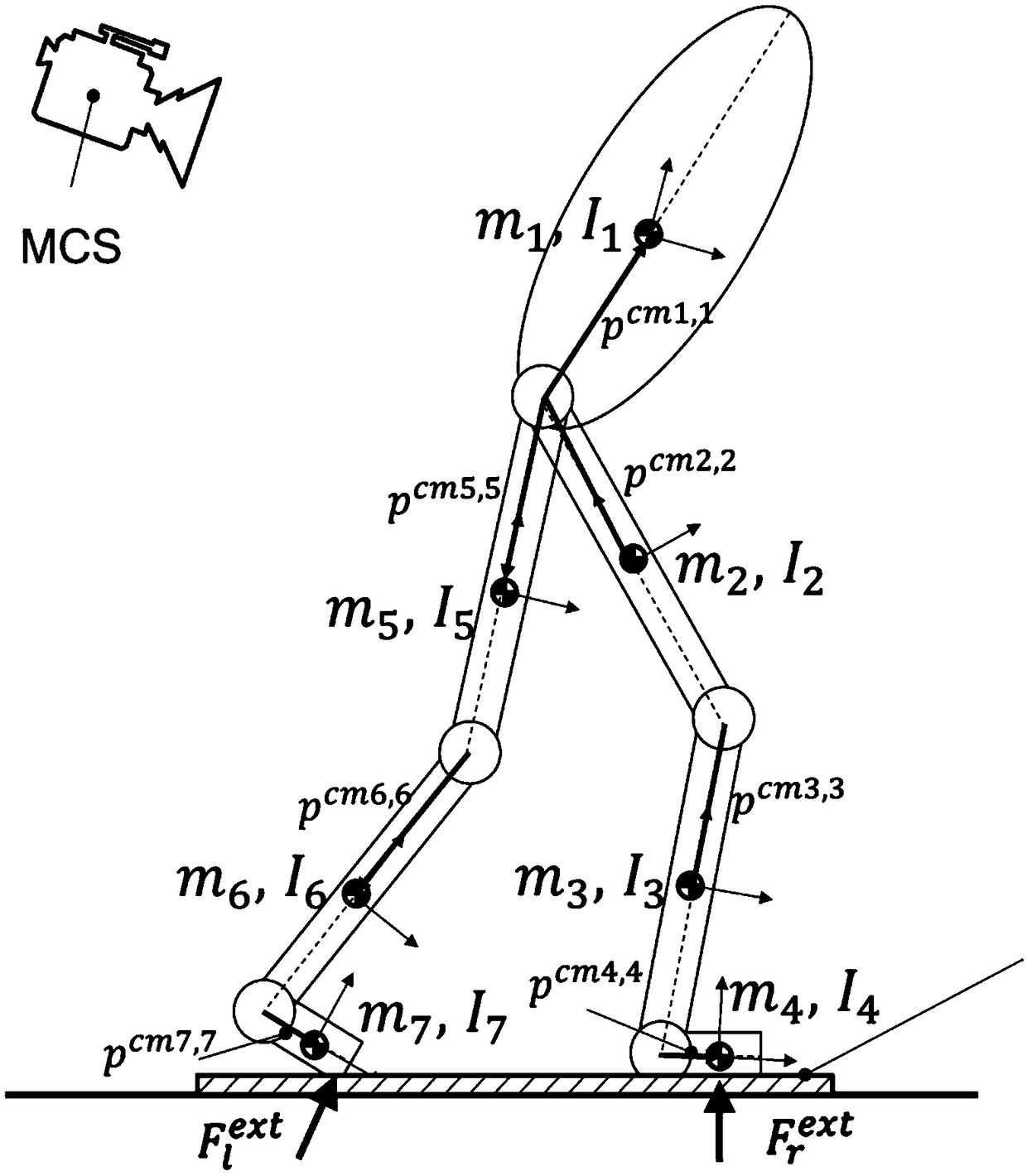
[0047] Such as figure 2 As shown, the motion capture system MCS collects the position, velocity and acceleration of each segment of the rigid body, and the ground reaction force detection system GRFDS respectively collects the reaction force of the left foot plantar surface and the reaction force on the plantar surface of the right foot
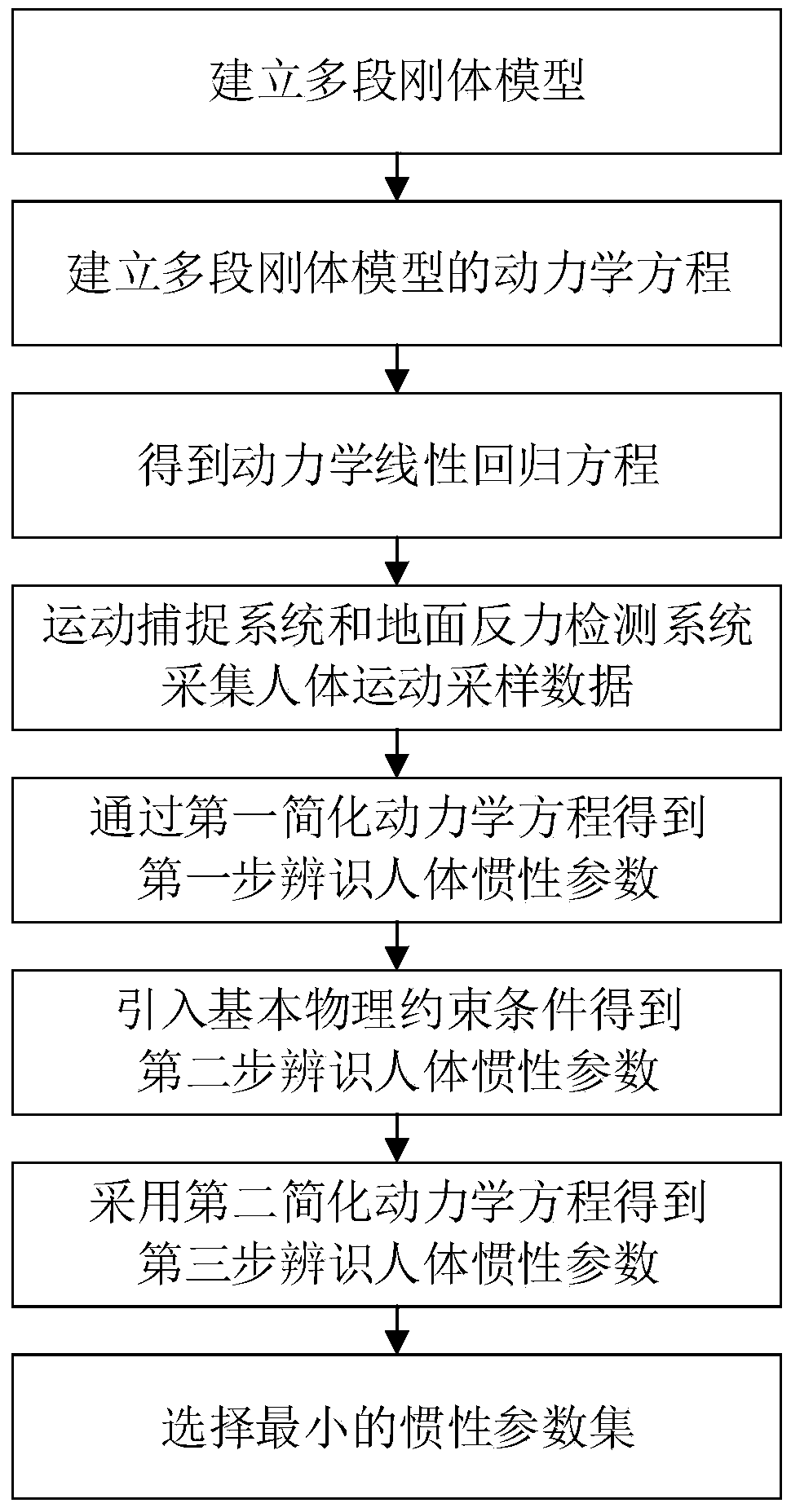
[0048] The human body inertial parameter identification method combined with dynamic constraints in this embodiment, such as image 3 shown, including the following steps:
[0049] 1) First, according to the natural lower limb joint segmentation of the human body, the human body is si...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More