

Rehabilitation mechanical hand with independently adjustable distances among fingers and detachable five fingers
A robotic hand and five-finger technology, applied in passive exercise equipment, medical science, diagnosis, etc., can solve the problems of inability to achieve overall hand rehabilitation, inability to achieve natural bending of fingers, palm size and finger length difference, etc., to achieve bone structure The design is reasonable and novel, it is convenient for installation and maintenance, and the effect of increasing wearing comfort
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] Below in conjunction with accompanying drawing, the present invention will be further described.
[0033] Explanation: Proximal Interphalangeal (PIP) is the proximal interphalangeal joint, and Metacarpophalangeal (MCP) is the metacarpophalangeal joint.
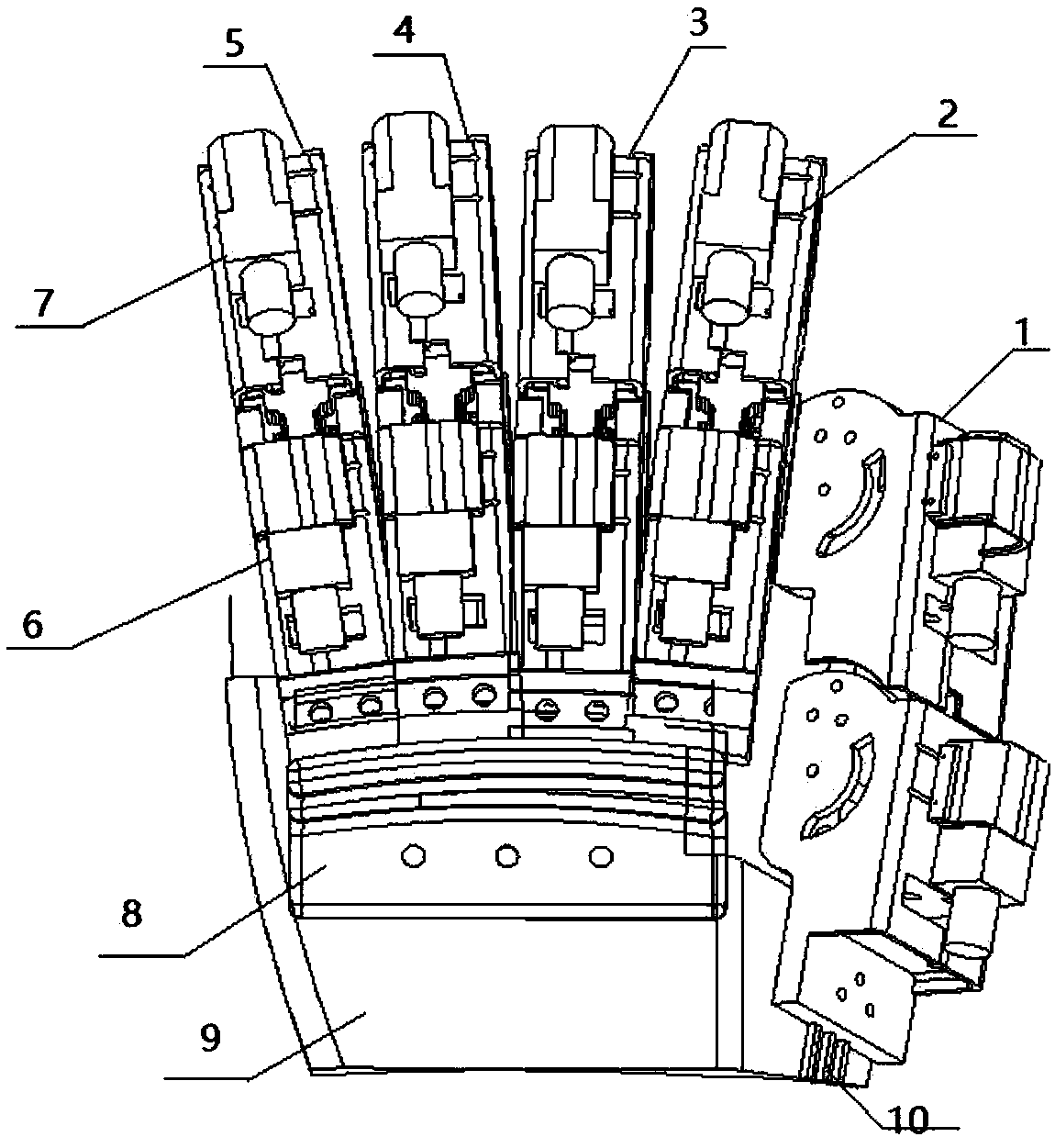
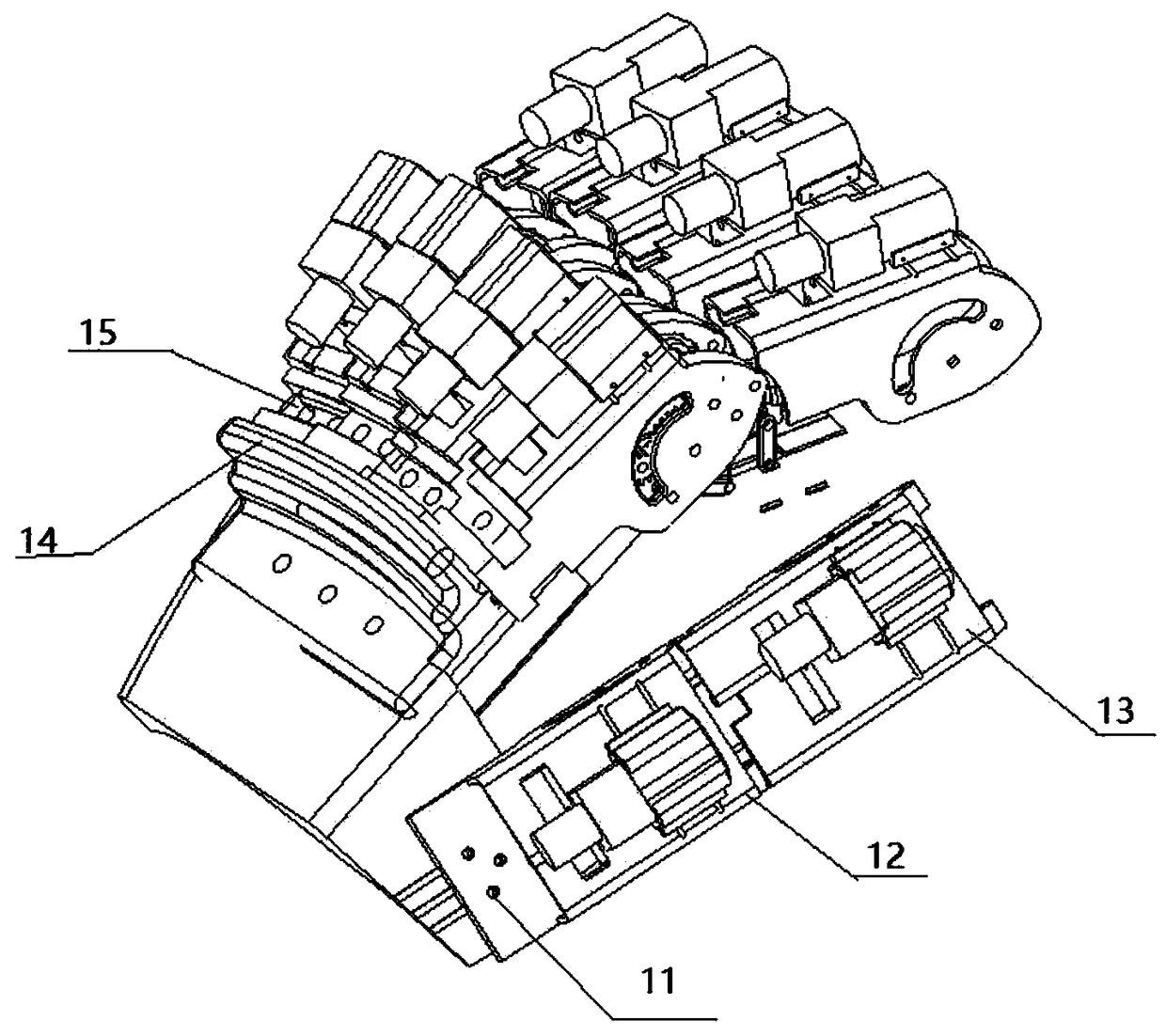
[0034] Such as figure 1 with figure 2 As shown, an autonomously adjustable and detachable five-finger rehabilitation manipulator includes a palm part, a finger part, and a motion control part.
[0035] The fingers include four finger structures and thumb structure 1. The four finger structures are index finger structure 2, middle finger structure 3, ring finger structure 4, and little finger structure 5. Thumb structure 1 and each finger structure include proximal metacarpal bones and MCP joints , the first phalanx and the PIP joint.
[0036] Since the structures of the index finger, middle finger, ring finger and little finger are similar, in this embodiment, the thumb structure 1 and the index finger structure 2 a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More