

Straight wheel driven variable diameter pipeline inspecting robot
An inspection robot and driving technology, which is applied in the direction of special pipes, pipe components, mechanical equipment, etc., can solve the problems that cannot meet the self-regulation of the positive pressure of the driving wheel, the structure of the spiral robot is complicated, and it cannot automatically adapt to the change of pipe diameter. , to achieve the effect of small space occupation, large adaptability and flexible movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be described in further detail below in conjunction with the accompanying drawings.
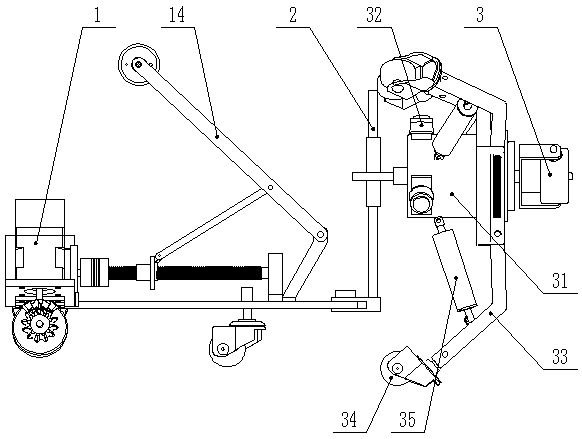
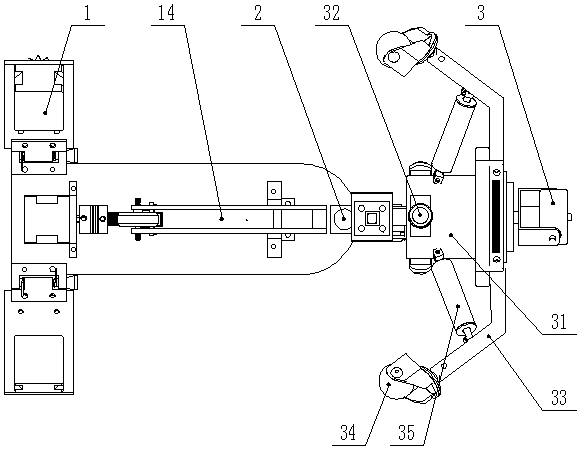
[0034] like Figure 1-Figure 9 As shown, the direct-wheel-driven variable-diameter pipeline inspection robot of the present invention includes: a driving unit 1, a turning and centering system 2 and a detection unit 3, and the driving unit 1 and the detection unit 3 are connected to the centering system 2 through turning;
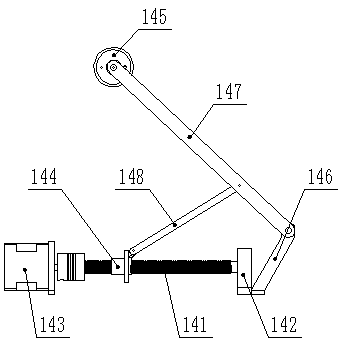
[0035] The structure of the drive unit 1 is as follows: two driving wheel systems 11 are installed on both sides of the rear end of the base plate 12, a universal support wheel 13 is installed on the front end of the base plate 12, and a variable diameter active adjustment system 14 is installed on the base plate 12;
[0036] The structure of the driving wheel system 11 is as follows: the motor 111 and the driving wheel 112 are installed on the mounting plate 113, the output shaft of the motor 111 is connected to the rotating shaft of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More