

Under-actuated unmanned ship target enclosing controller structure and design method
A technology of controllers and unmanned ships, applied in the direction of non-electric variable control, control/regulation system, two-dimensional position/channel control, etc., can solve the problem of fast and time-varying speed moving targets that are not applicable and the controller is not applicable , without considering the horizontal drifting of unmanned ships, etc., to achieve the effect of expanding the field of motion control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
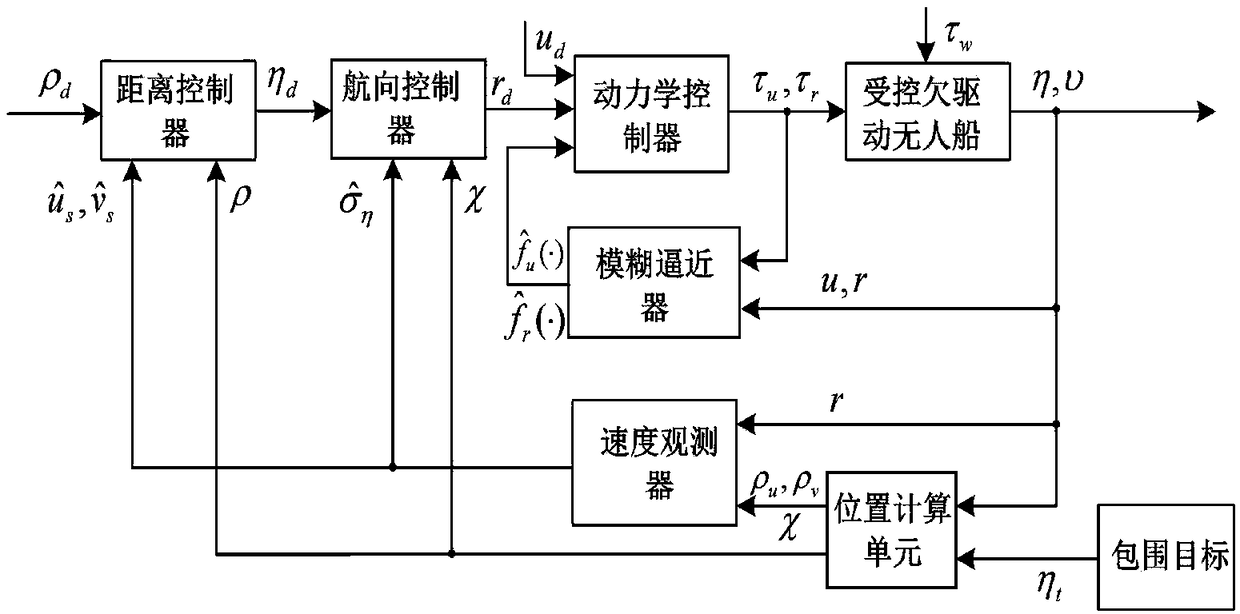
[0072] In the following, target encirclement control is performed for a specific unmanned ship, and the present invention is further described by taking this as an example. figure 1 For the structural schematic diagram of the present invention, first rewrite the kinematic model (2) and the dynamic model (3) of the controlled unmanned ship as:
[0073]
[0074] in:
[0075]
[0076] The specific parameters of the unmanned ship model are selected as follows:
[0077]
[0078]
[0079]
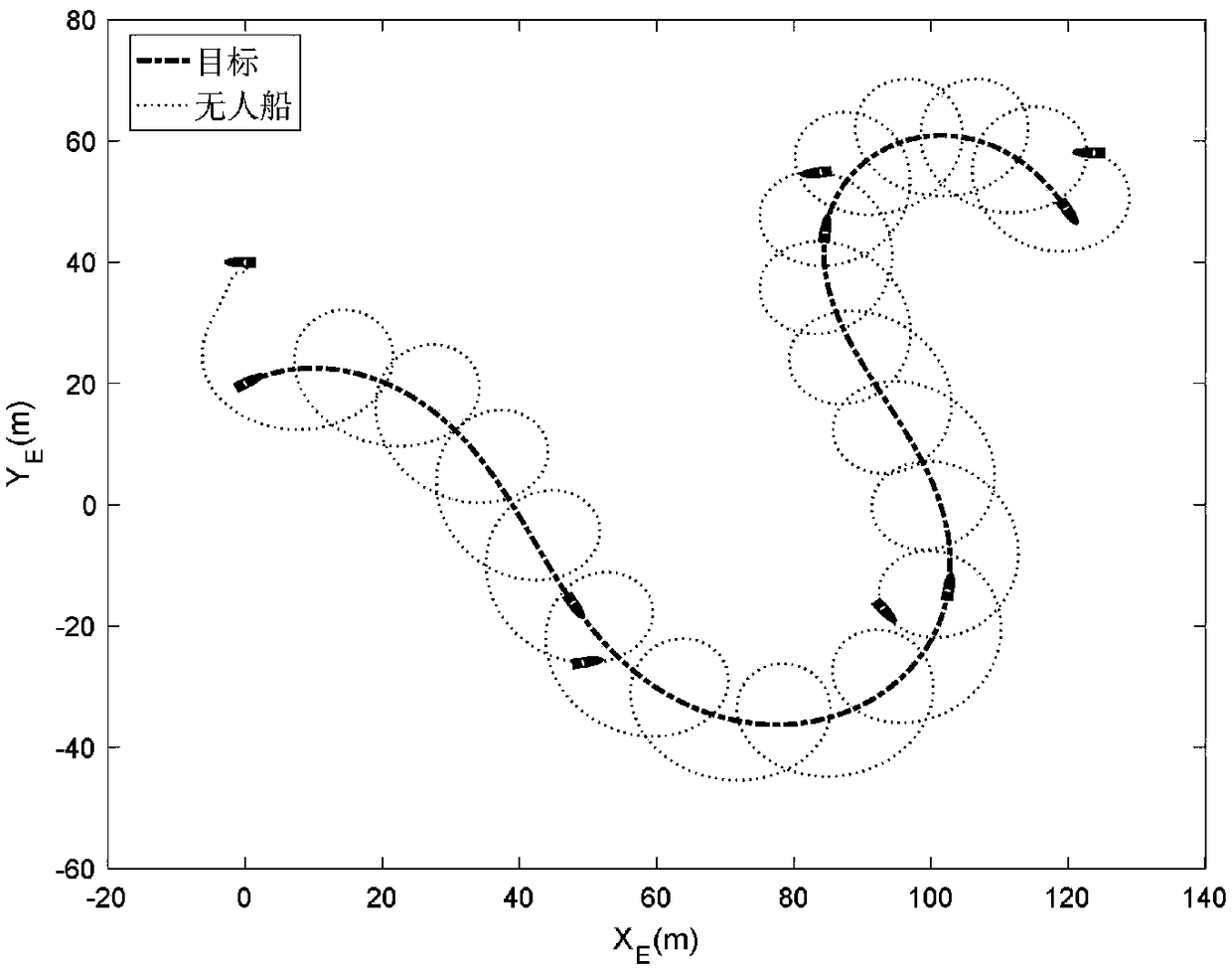
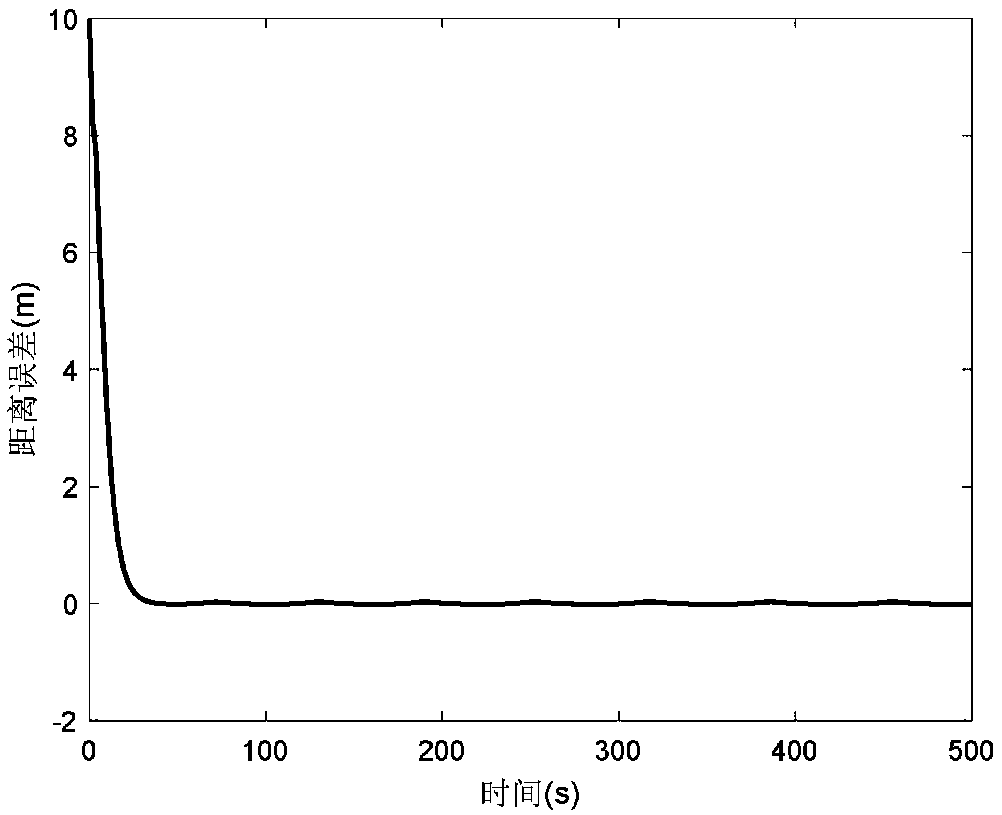
[0080] The surrounding target speed is u t =0.2+0.5sin(πt / 800), r t =-0.01cos(πt / 500), the control target is set to ρ d =10,u d =1+0.1sin(t / 10), the initial positions of the controlled unmanned ship and the target are respectively set as and The structure of the target encircling controller satisfies equations (4)-(12), and the specific control parameters are selected as follows:
[0081] k 1 =20,k 2 =100,k 3 =20,k 4 =100,k 5 =20,k 6 =100,k 7 =220,k 8 = 220
[008...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More