

Multi-degree-of-freedom soft finger rehabilitation robot
A technology of rehabilitation robot and degree of freedom, which is applied in the direction of manipulators, program-controlled manipulators, chucks, etc. It can solve the problems of difficult recovery, loss of hand movement function, etc., and achieve good rehabilitation effect, cost saving, and convenient portability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] In order to make the technical means, inventive features, and technical effects realized by the present invention easy to understand, the present invention will be further described below in conjunction with specific illustrations.
[0022] In this embodiment, the metacarpal bone refers to the bone end where the palm meets the finger, the proximal phalanx refers to the bone end close to the finger, the metacarpophalangeal joint refers to the joint where the palm connects to the finger, and the second joint refers to the joint of the finger. The joint where the proximal segment joins the middle segment.
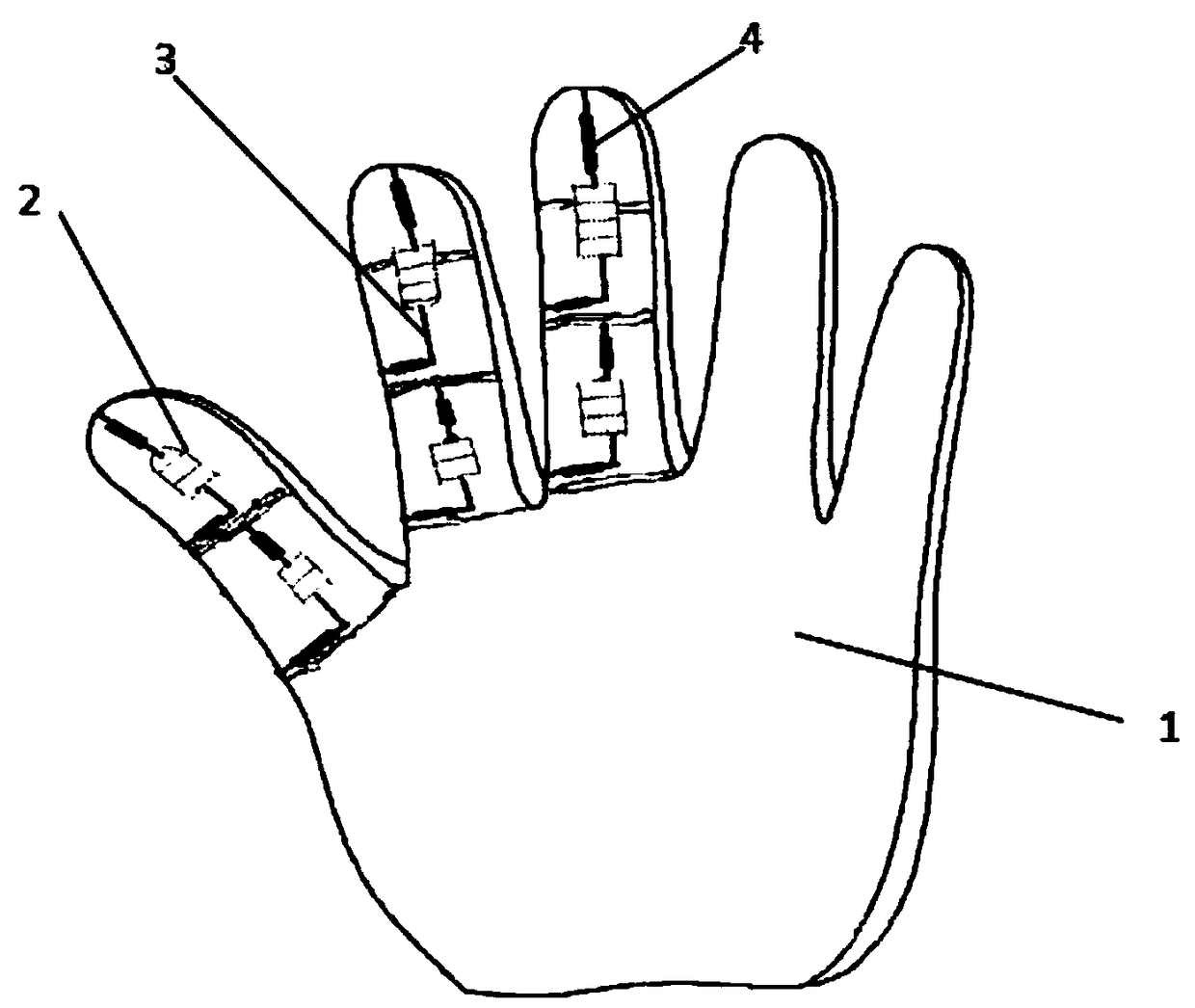
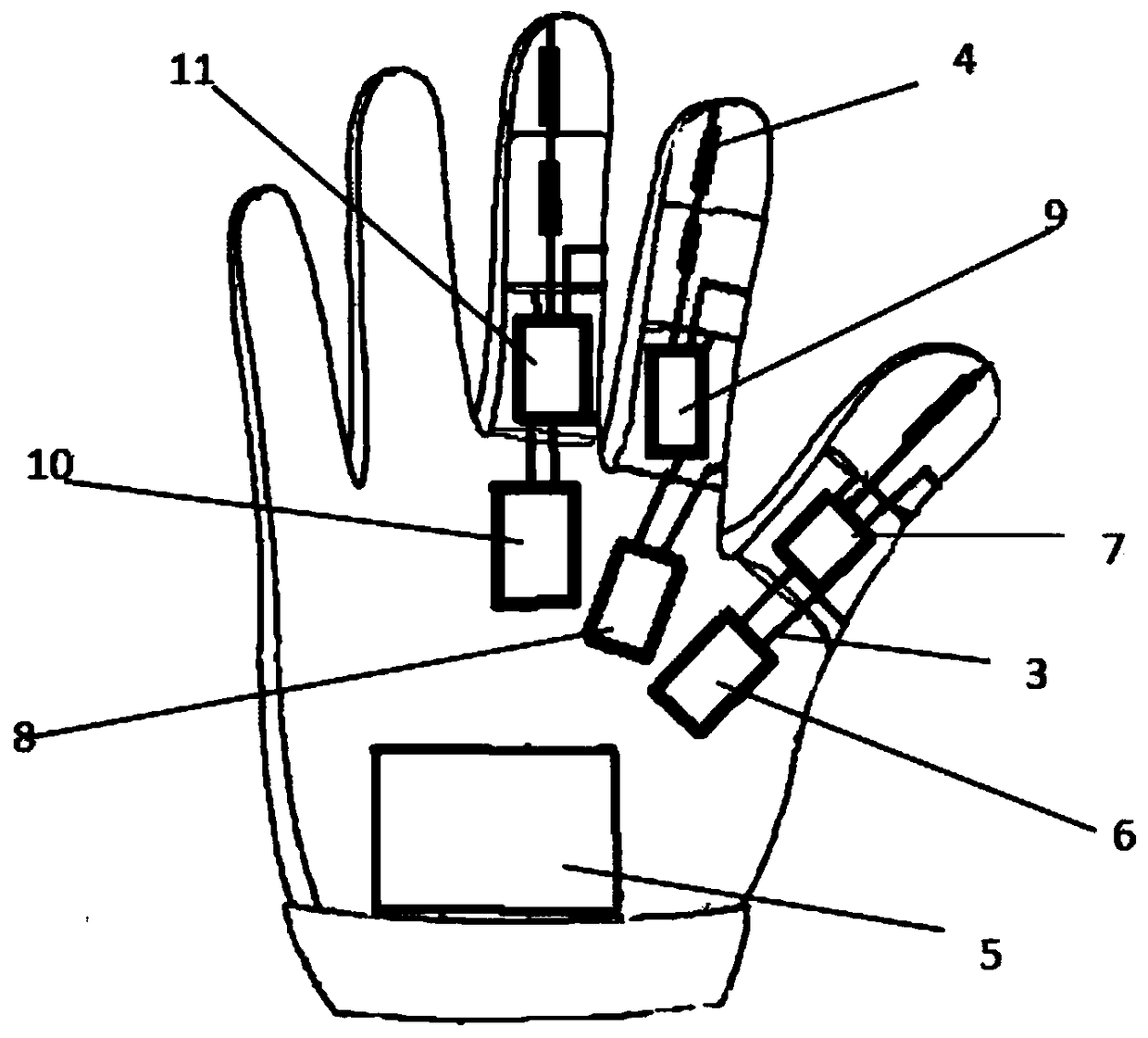
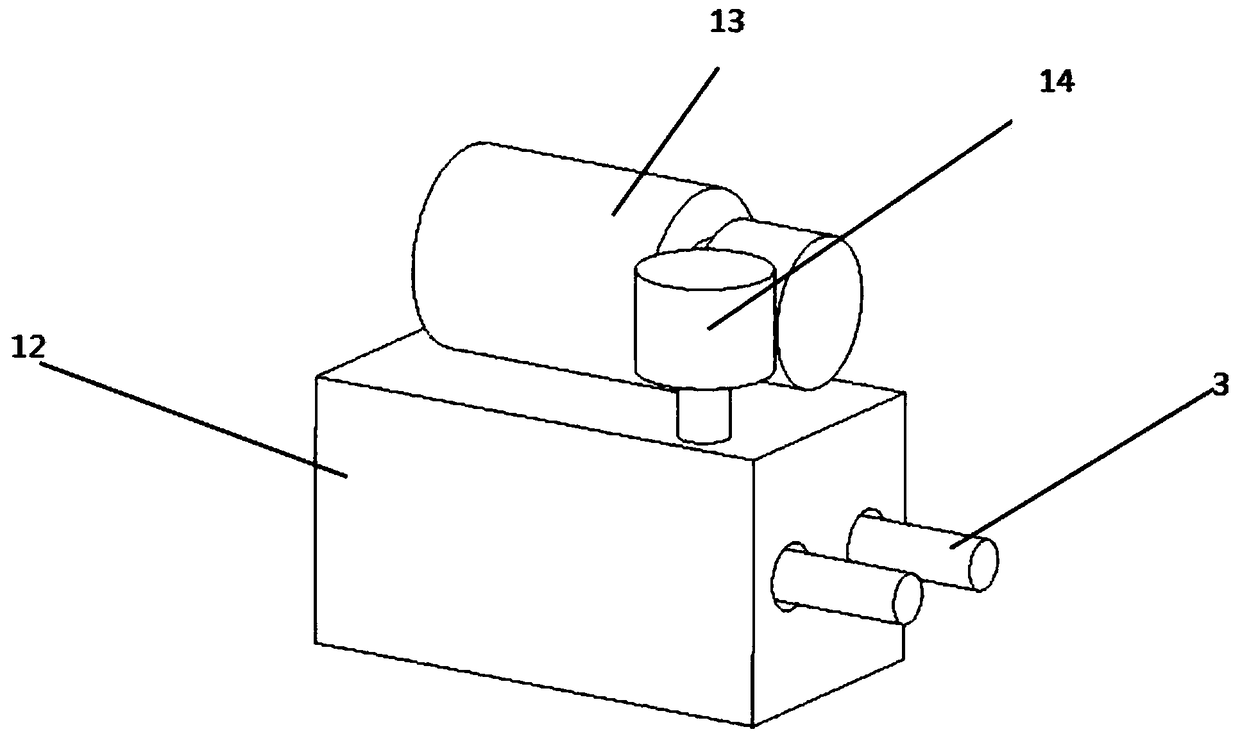
[0023] A multi-degree-of-freedom soft finger rehabilitation robot, including a flexible exoskeleton glove 1, a flexible angle sensor 2, multiple sets of Bowden wires 3, and a drive module; wherein, the flexible exoskeleton glove 1 adopts a 3-finger structure, which can control fingers independently The second knuckle and metacarpophalangeal joint can control 6 degrees o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More