

Underwater multi-sensor cooperative passive tracking method based on dynamic cluster
A passive tracking, multi-sensor technology, used in instruments, measuring devices, mapping and navigation, etc., can solve the problems of low tracking accuracy and high energy consumption, and achieve the effect of ensuring convergence and reducing energy consumption.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0022] Embodiment 1. This embodiment proposes a method for passive tracking of underwater multi-sensor cooperative targets based on dynamic clusters, which includes the following steps:
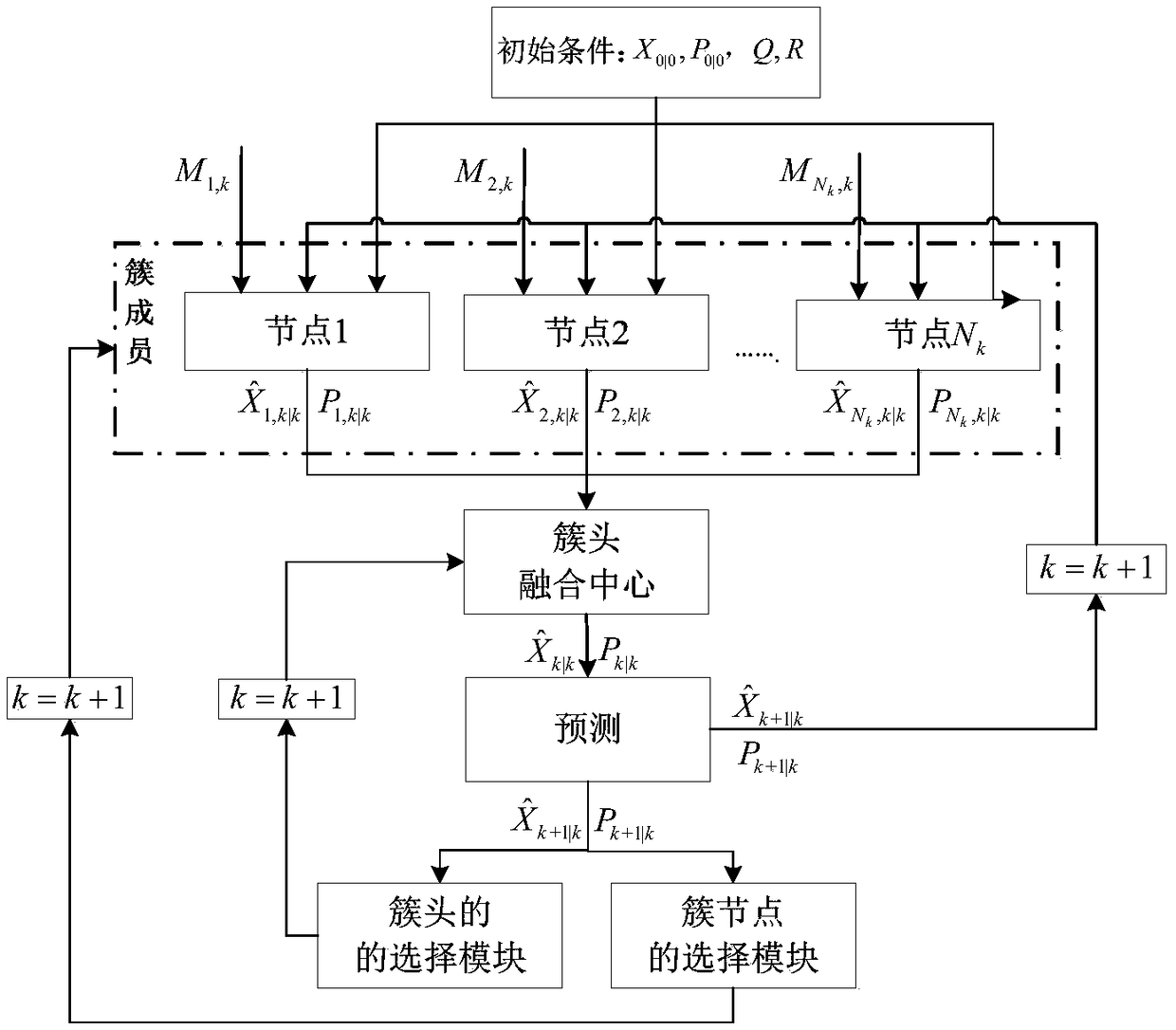
[0023] S1. Cluster member nodes perform local state estimation. At time k, the selected N k According to the cluster head node CH k-1 Predicted value of fusion state And the fusion prediction error covariance P k|k-1 , Respectively use the unscented Kalman filter to obtain the local state estimation of the target at time k And the corresponding error covariance P i,k|k , And send the local state estimation and error covariance to the cluster head node CH at time k k . The specific process of the unscented Kalman filter algorithm is as follows:
[0024] S11, according to the cluster head node CH k-1 Predict the fusion state of the target at time k And prediction error covariance P k|k-1 , Use UT transform to obtain 2n+1 sigma sampling points, and calculate the corresponding weights of the sam...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More