Contour error estimation method based on H-shaped precision movement platform
A precision motion and contour error technology, applied in the direction of instruments, digital control, control/regulation systems, etc., can solve the problems of increased estimation error, inappropriateness, long calculation time, etc., and achieve the effect of reducing contour error and improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
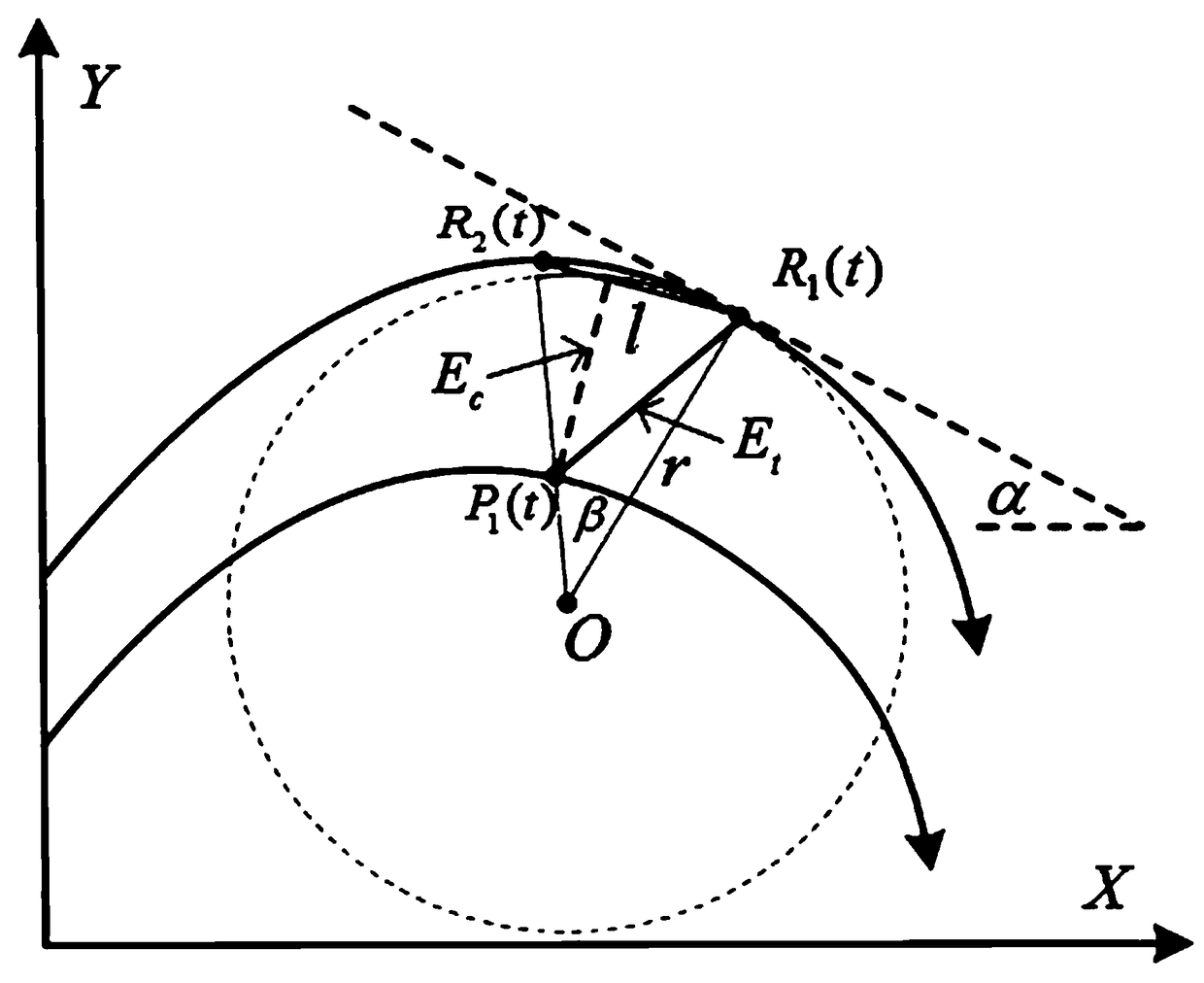
[0045] Specific implementation mode 1: The real-time contour error estimation model of any trajectory is as follows figure 1 As shown, R 1 (t) is the desired trajectory position; R 2 (t) obtains the reference point on the desired track for reverse deduction; P 1 (t) is the actual motion track position; E t is the contour tracking error; O and r are respectively over R 1 (t) The center and radius of the inscribed circle; l is the arc length corresponding to the angle β; 1 The angle between the tangent line at point (t) and the X axis. Contour estimation error E c for P 1 (t) to line R 1 (t)R 2 (t) distance.
[0046] Step 1: Calculate at the reference point R 1 The curvature ρ and curvature radius r at (t) are as follows:
[0047]
[0048] in, for the desired machining profile in R 1 (t) the slope when the Y axis is the independent variable; for the R 1 The second derivative at (t) with the X axis as the independent variable.
[0049] Step 2: Calculate R 1 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More