

Window-wiping robot conducting blind-area-free cleaning on glass with border
A robot, no blind spot technology, applied in cleaning equipment, window cleaning, household utensils, etc., can solve the problem of not being able to wipe the frame and four corners
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
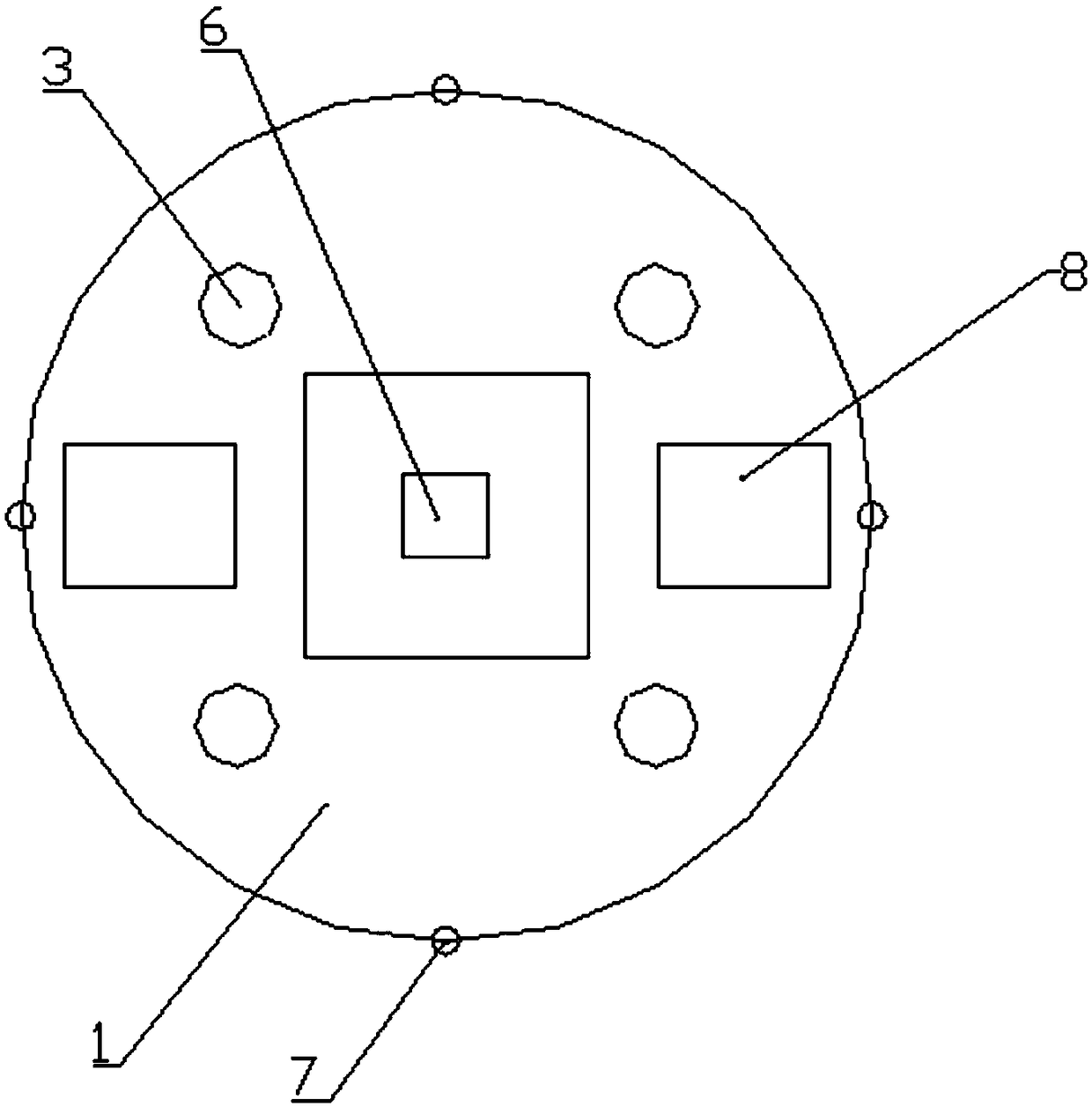
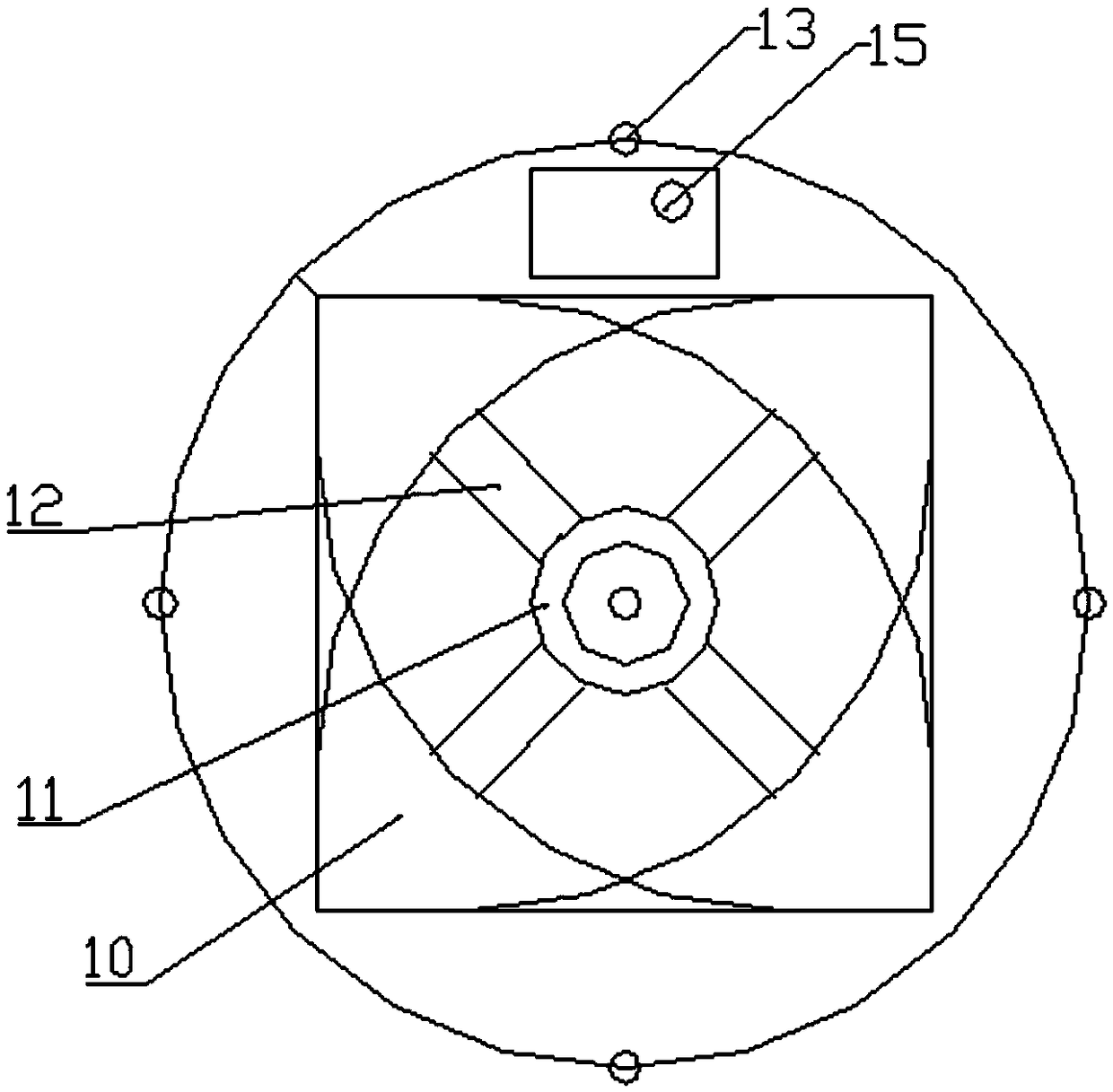
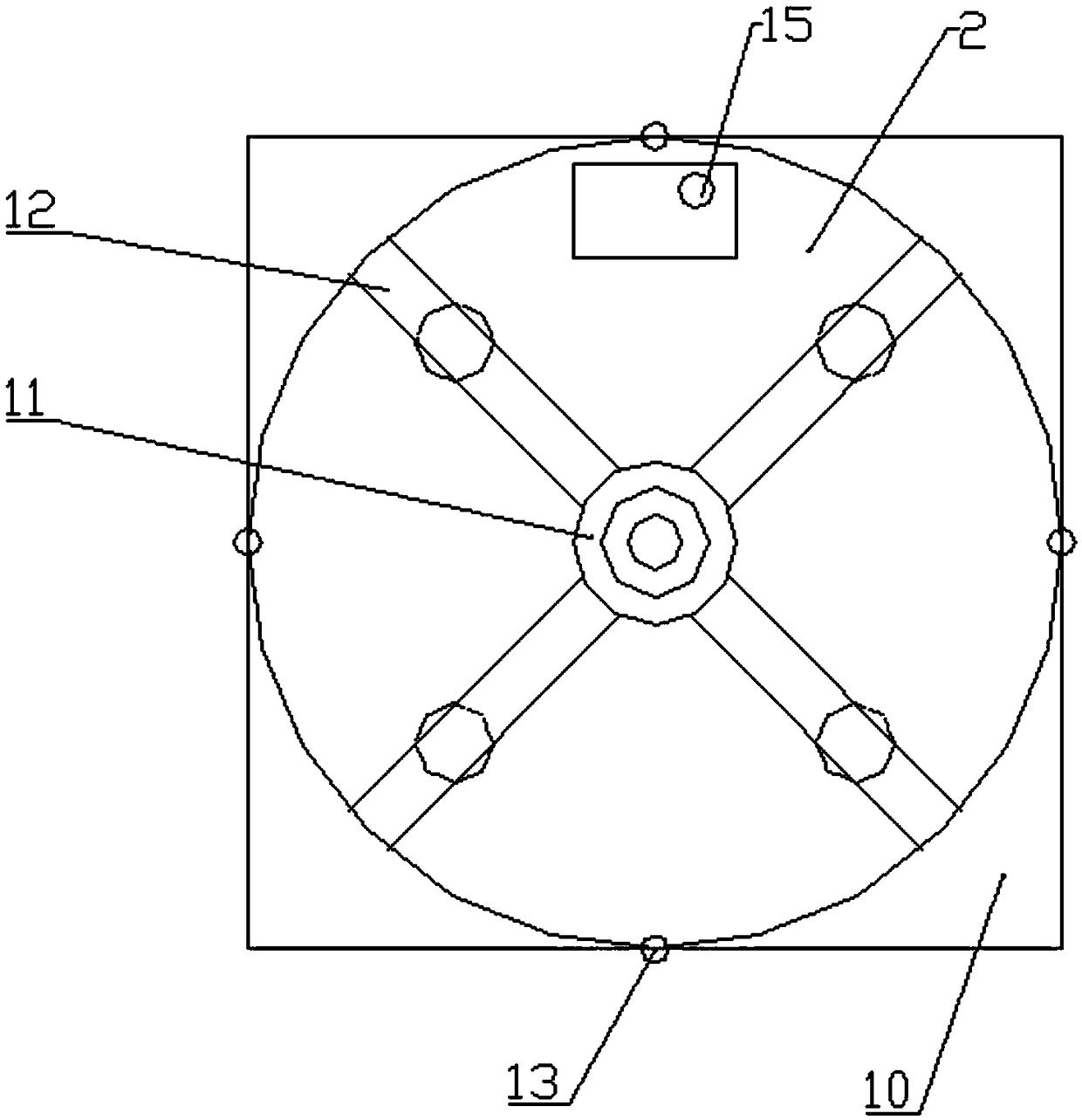
[0033] refer to Figure 1-7 As shown, this embodiment is a glass-wiping robot for rectangular glass with a frame, and the robot includes an active surface 1 , a passive surface 2 and a permanent magnet 3 . It consists of a circular active surface 1 embedded with a permanent magnet 3 and a passive surface 2 with a controllable shape and an initial shape of a circle embedded with a permanent magnet 3 . The permanent magnet 3 adsorbs the two surfaces on both sides of the glass by magnetic force, and the active surface drives the passive surface to control the movement of the robot. The circular driving surface is a circular car body with two wheels, two wheels are symmetrically distributed on the circular driving surface 1 on one diameter, and the forward direction is perpendicular to this diameter. The active surface is responsible for controlling the movement of the robot. The first single-chip microcomputer 4, the first motor drive module 5, the gyroscope 6 module and the fi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More