

Multi-robot route planning method applied to dangerous chemical environment
A multi-robot and path planning technology, applied in navigation computing tools and other directions, can solve problems such as formation formation and action strategy selection difficulties
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0042] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments. Note that the aspects described below in conjunction with the drawings and specific embodiments are only exemplary, and should not be construed as limiting the protection scope of the present invention.
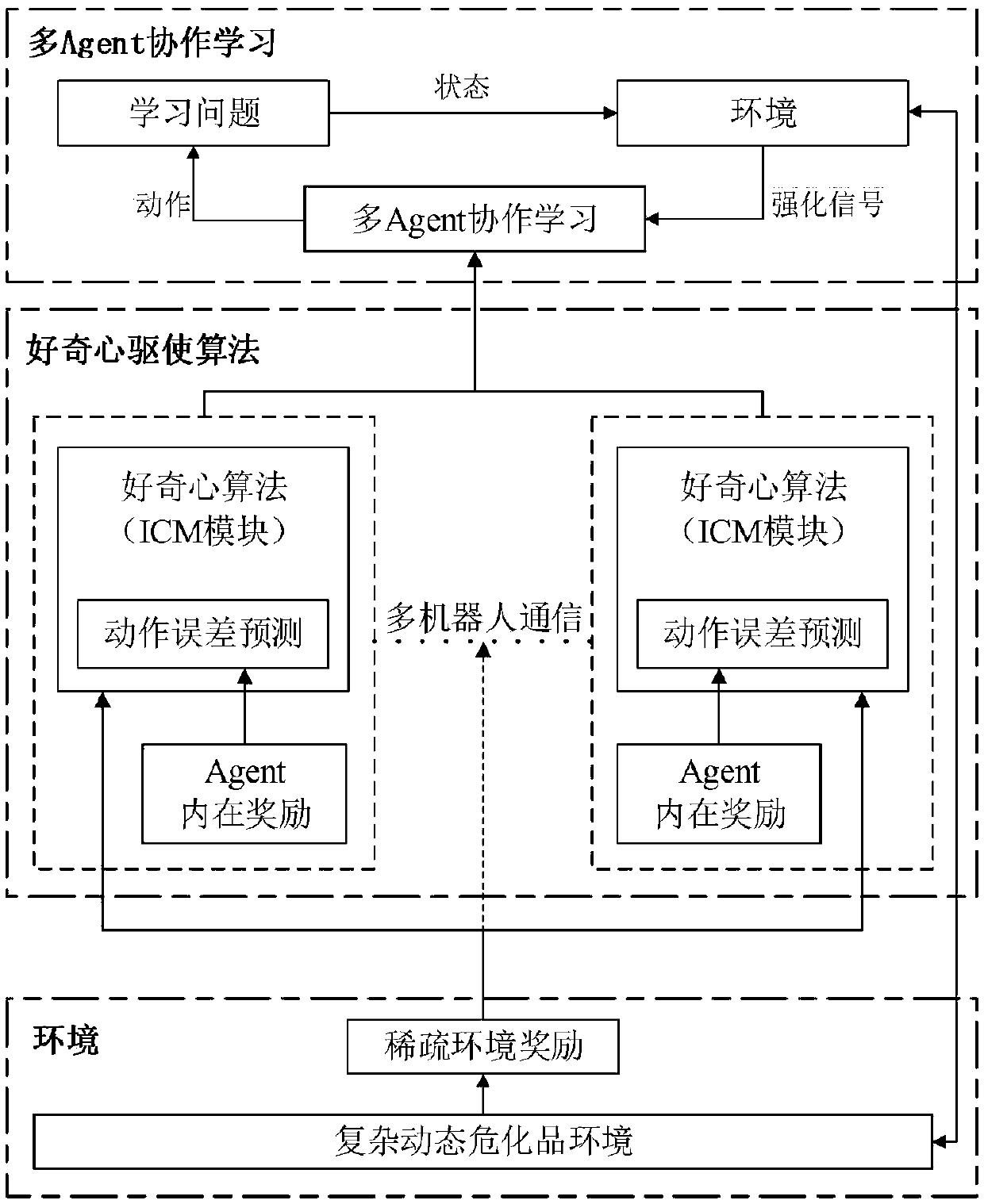
[0043] Step 1: The hazardous chemical environment is built according to the real hazardous chemical environment through the Unity3D engine, in which static obstacles of traditional chemical buildings are set, such as figure 2 shown;
[0044] Step 2: Add dynamic obstacles to the environment, simulate moving objects in the real environment, and specify target points to simulate the place where special events occur;
[0045] Step 3: In the Unity3D engine, it is only necessary to design sparse environment rewards to perform simulation training. The rewards only need to be based on the rewards after the robot reaches the target point and the puni...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More