Bluetooth positioning method and system based on indoor map information
A Bluetooth positioning and indoor map technology, which is applied in the directions of location information-based services, specific environment-based services, wireless communication, etc., can solve the problem of Bluetooth tag positioning data passing through walls, etc. sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] In order to make the object, technical solution and advantages of the present invention clearer, various embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
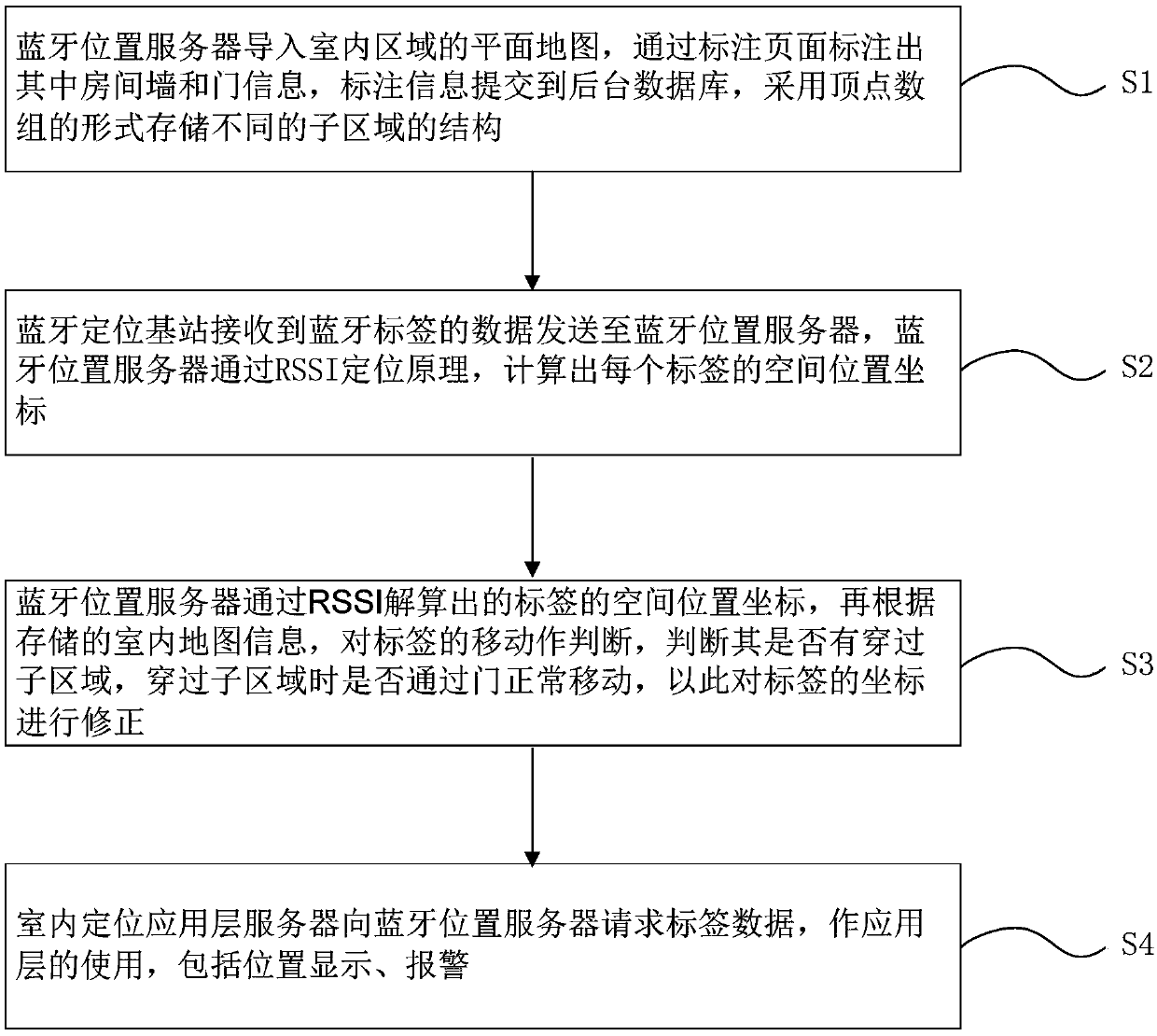
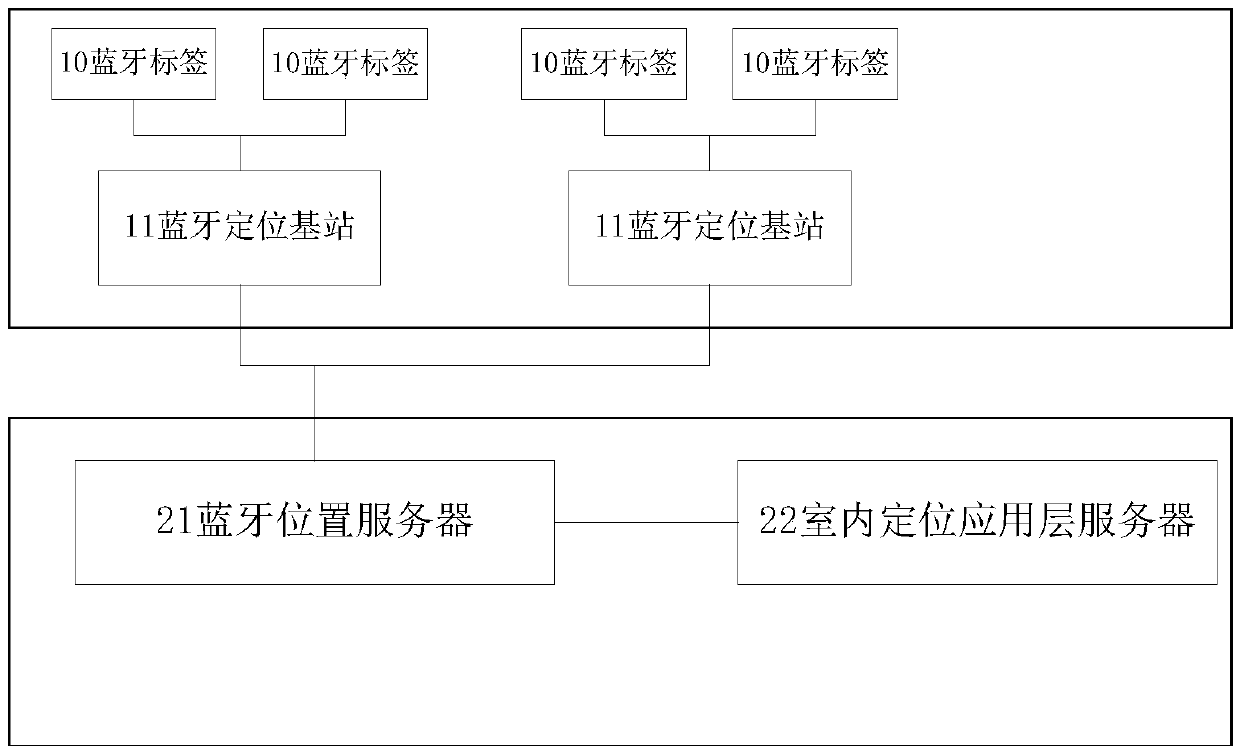
[0026] combine figure 1 and figure 2 As shown, a Bluetooth positioning method based on indoor map information includes the following steps:
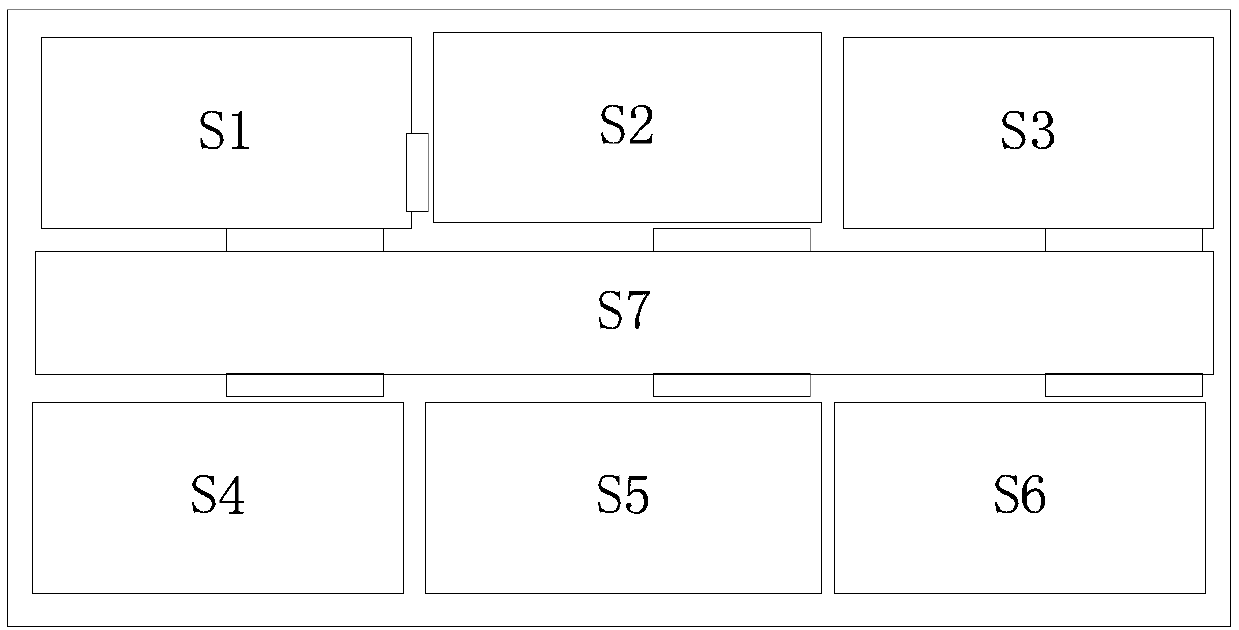
[0027] S1, import the planar map of the indoor area into the Bluetooth location server, mark the room wall and door information through the page, submit the marked information to the background database, and store it in different sub-areas in the form of vertex arrays. Among them, a, b, c, d, e, f, and g are each sub-area respectively, and the surrounding area around each sub-area is a wall, and the "line segment" set on the "wall" is a "door".
[0028] Specifically, the information of the room walls in the area is described in the form of polygon vertices. For the convenience of subsequent calculations, th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com