

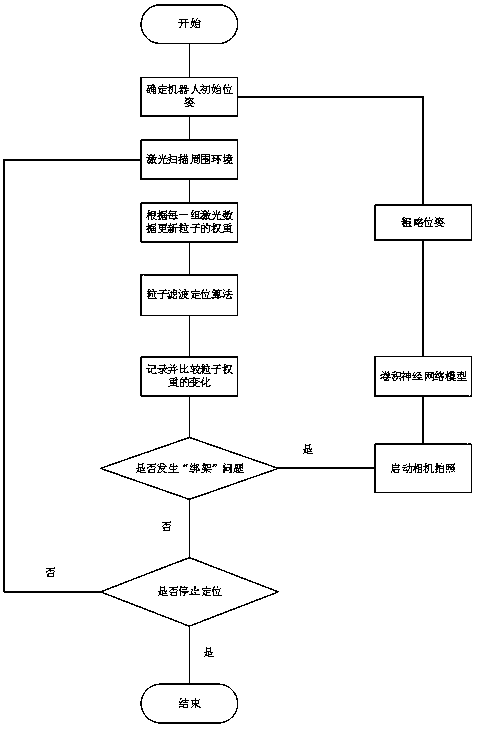
Method for quickly processing "kidnapping" problem of mobile robot positioning
A mobile robot, positioning algorithm technology, applied in the field of robotics, can solve the problems of reduced real-time performance, positioning failure, unable to achieve accurate positioning, etc., to achieve the effect of reducing the number of resampling and fast processing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
[0021] The robot body in this embodiment can be a system as described below: use Turtlebot2.0 and carry a zed binocular camera and RPlidar lidar, it is a wheeled robot based on the ROS platform, and ROS (Robot Operating System) is a distributed module It is a robot software platform that has a large number of software libraries and corresponding tools to help people develop robot applications. The robot positioning system mainly includes odometery, map_server and RPlidar. Among them, odometery is the odometer node, which sends the odometer information of the ROS (Robot Operating System) robot to the AMCL position...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More