

Automatic navigation and mapping robot and control method
A technology of automatic navigation and control method, applied in the field of robot navigation, can solve the problems of low degree of intelligence and low simplicity, and achieve the effect of high intelligence, simple control and good obstacle avoidance effect.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and through specific implementation methods.
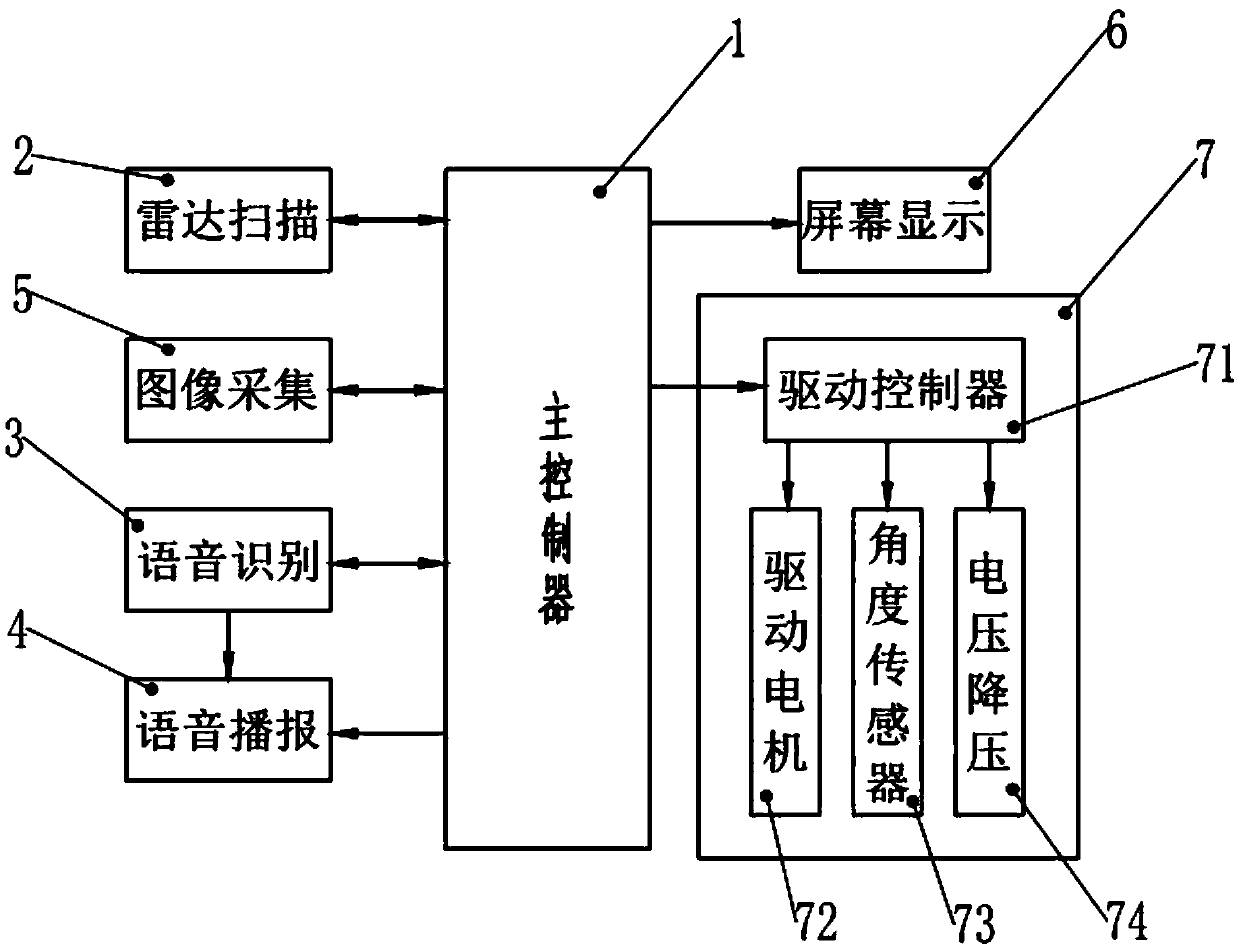
[0053] A control method for an automatic navigation and mapping robot in this embodiment is characterized in that the automatic navigation and mapping robot is provided with a main controller 1, a radar scanning module 2, an image acquisition module 5 and a driving module 7, through the The main controller 1, the radar scanning module 2, the image acquisition module 5 and the driving module 7 realize a map surveying and mapping function, and the map surveying and mapping function includes the following steps:
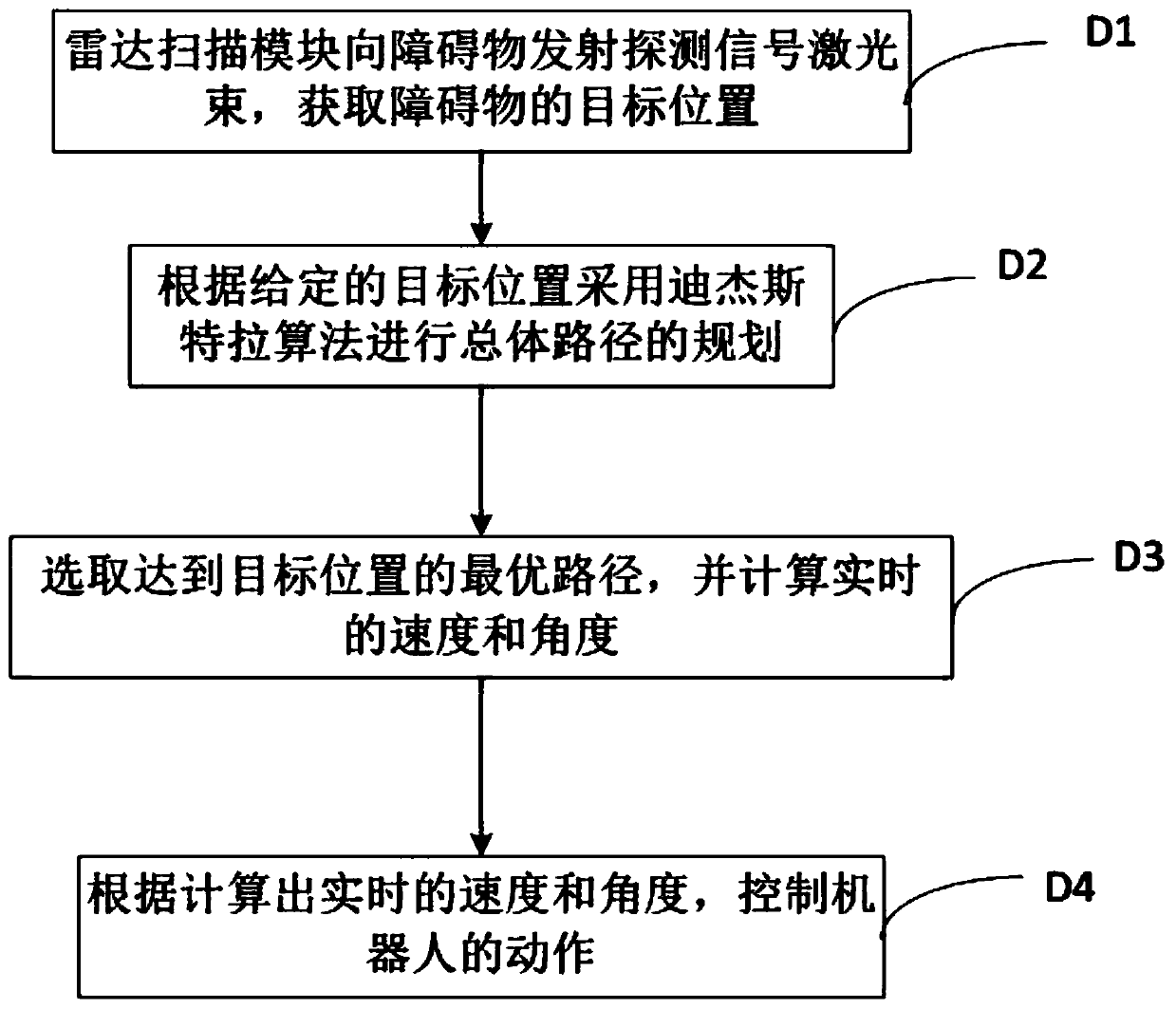
[0054] Step D1: Initialization: transmit the detection signal laser beam to the obstacle through the radar scanning module 2, and then compare the received signal target echo reflected from the target with the transmitted signal;
[0055] Step D2: Global path planning: Plan the overall path a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More