

A hydrodynamic analysis method for a grabbing movement process of an underwater robot and a manipulator system
A technology of underwater robots and motion processes, applied in the testing of machines/structural components, fluid dynamics tests, instruments, etc., can solve problems such as the research object limit, and achieve the effect of reducing disturbance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0044] The present invention will be further described below in conjunction with accompanying drawing:
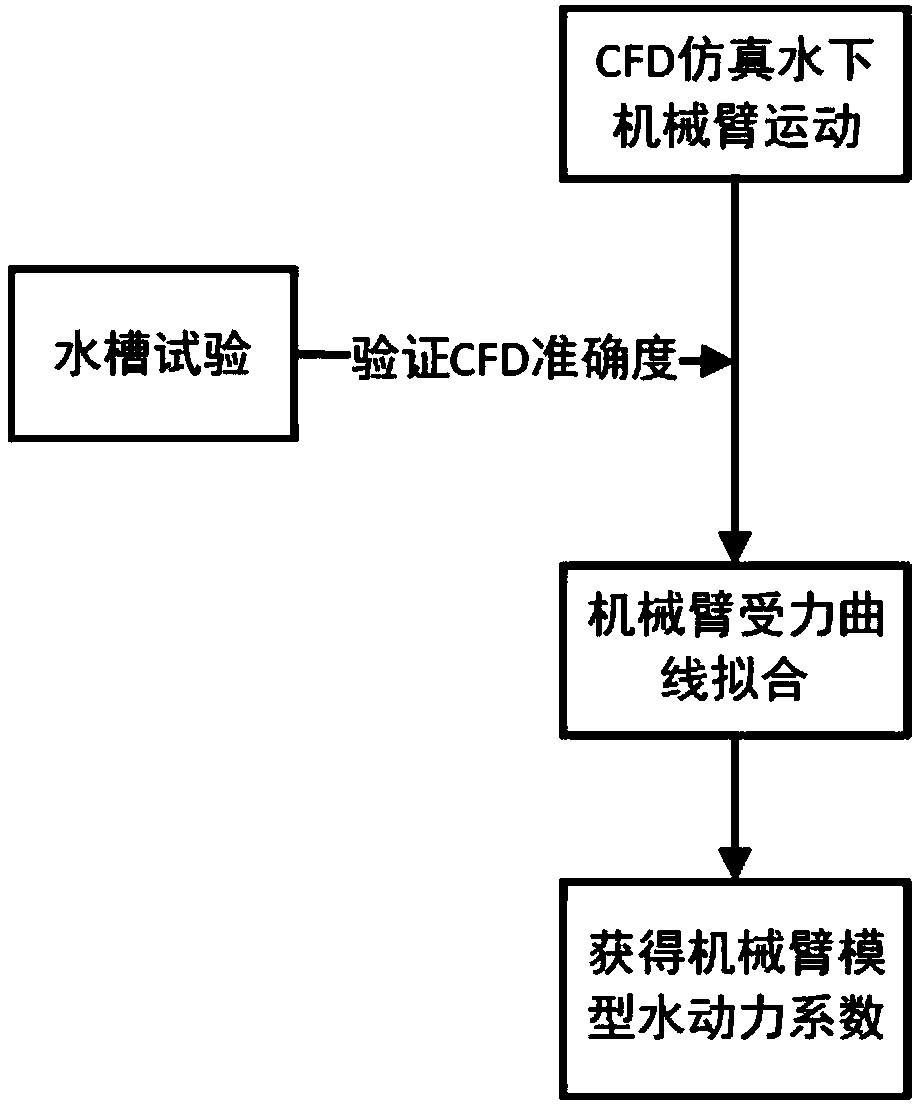
[0045] The invention relates to an underwater robot and a manipulator system grasping motion process CFD numerical simulation method. It is mainly used in the early stage of UVMS design to conduct qualitative and quantitative analysis of the disturbance effect of the designed manipulator on the force and torque of the UVMS system, and to obtain the hydrodynamic coefficient of the manipulator by fitting, thereby providing reference for further optimized design of the UVMS system.
[0046] The invention provides a hydrodynamic analysis method for an underwater robot and a manipulator system UVMS grasping motion process based on computational fluid dynamics CFD software STAR-CCM+ software. Including UVMS system circulating tank test and CFD numerical simulation. The UVMS circulating water tank test includes: using a planar motion mechanism to measure the force of the UVMS sys...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More