

Error-controllable short line segment trajectory smoothing method
A small line segment and trajectory technology, applied in the direction of digital control, automatic control device, electrical program control, etc., can solve the problems of not meeting the error requirements and low continuity of linear trajectory, achieve uniform distribution of chord height errors, improve work efficiency and Effect of work quality, uniform smoothing effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031]In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and examples of implementation. It should be understood that the specific implementation cases described here are only used to explain the present invention, and are not intended to limit the present invention.
[0032] An error-controllable small line segment trajectory smoothing method of the present invention comprises the following steps:
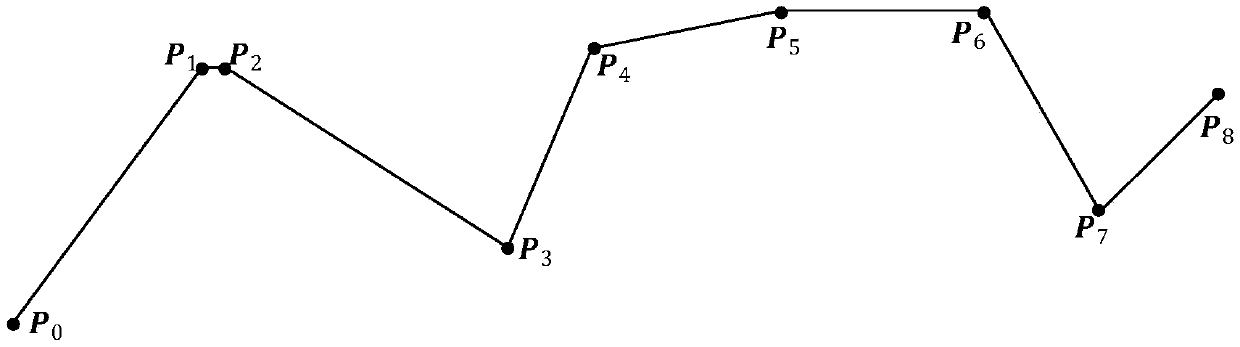
[0033] Step 1. Robot track point preprocessing: traverse all the track points of the entire track, segment according to the distance and angle between track points, and divide the whole track into several polyline segment sets. by figure 1 Take the 9 track points as an example, all track points are recorded as First, judge the distance threshold, for m=0,1,...7, calculate the length |P m P m+1 |, if |P m P m+1 | is less ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More