

System and method for calibrating tool center point of robot
A tool center point and correction system technology, applied in the field of robot tool center point correction, can solve problems such as robot tool center point correction, and achieve the effect of high correction accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] Embodiments of the robot tool center point calibration system and method thereof according to the present invention will be described below with reference to the accompanying drawings. For the sake of clarity and convenience in the description of the drawings, the sizes and proportions of the components in the drawings may be exaggerated or zoomed out. In the following description and / or claims, when an element is referred to as being "connected" or "coupled" to another element, it may be directly connected or coupled to the other element or there may be intervening elements; and when an element is referred to as " When "directly connected" or "directly coupled" to another element, there are no intervening elements, and other words used to describe the relationship between elements or layers should be interpreted in the same way. To facilitate understanding, the same components in the following embodiments are described with the same symbols.
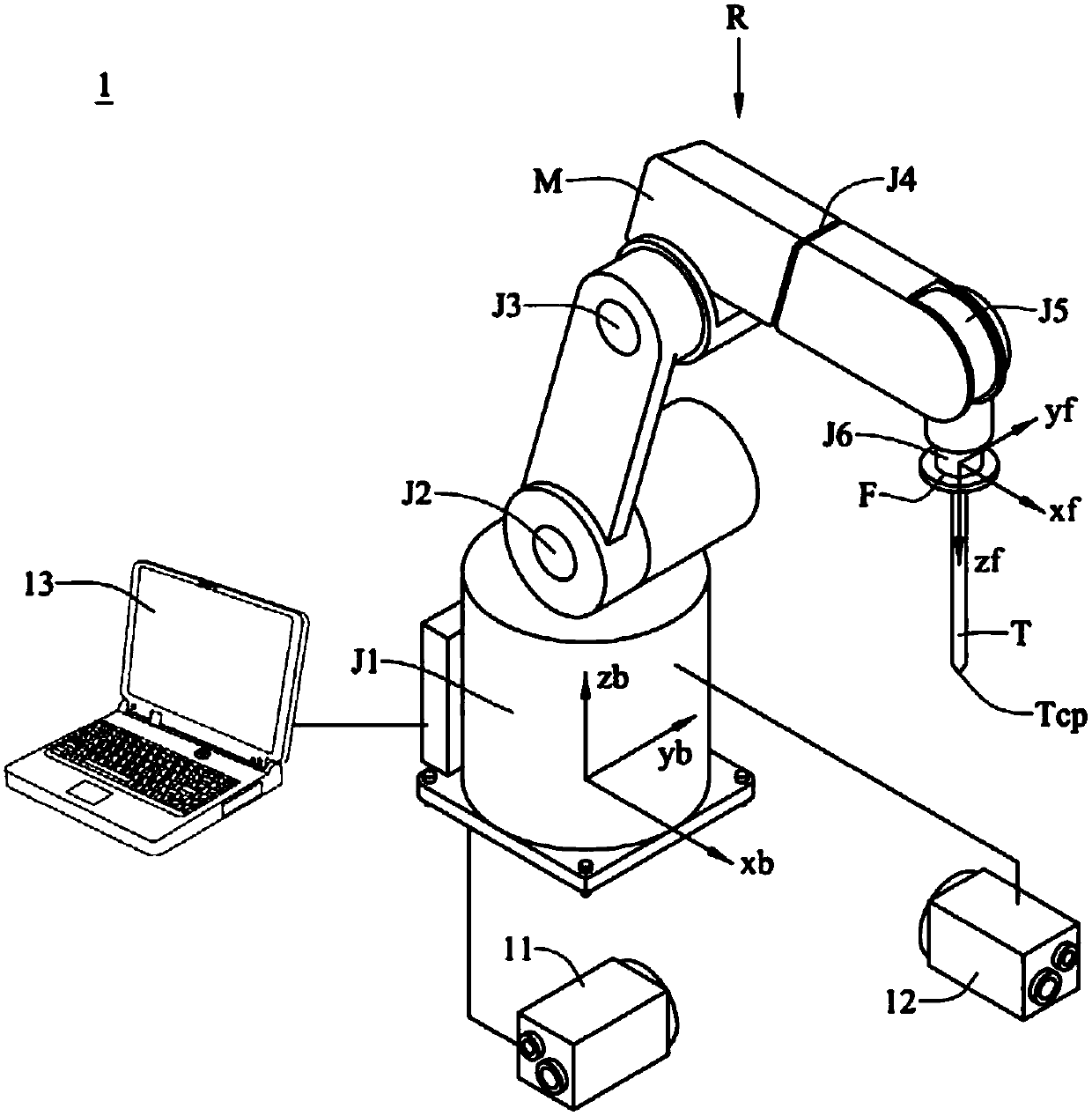
[0049] see figure 1 , ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More