

Method for calculating the pose of a threaded target object based on point cloud data
A technology of point cloud data and calculation method is applied in the field of calculation of the pose of a target object with threads, and can solve the problems of complex stud surface, low measurement accuracy, low efficiency, and inability to meet the real-time requirements of online measurement.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
[0021] Utilize the method provided by the invention to detect the stud on the automobile workpiece, the specific steps are as follows:
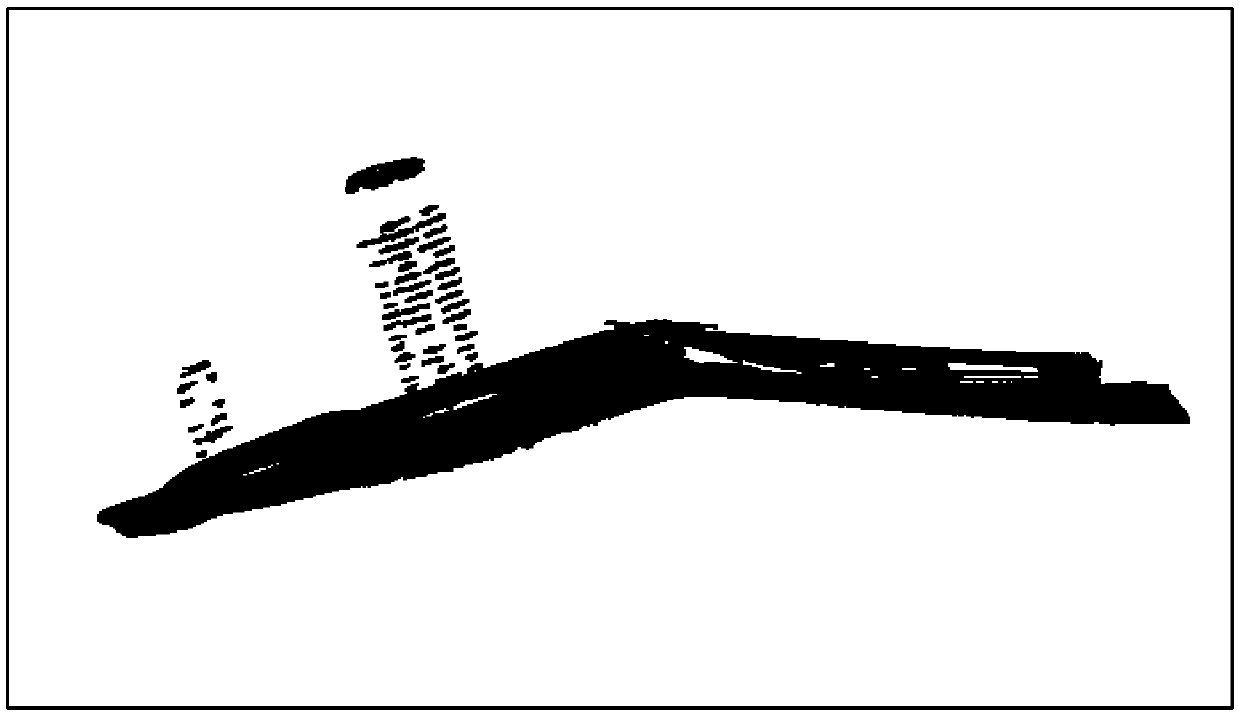
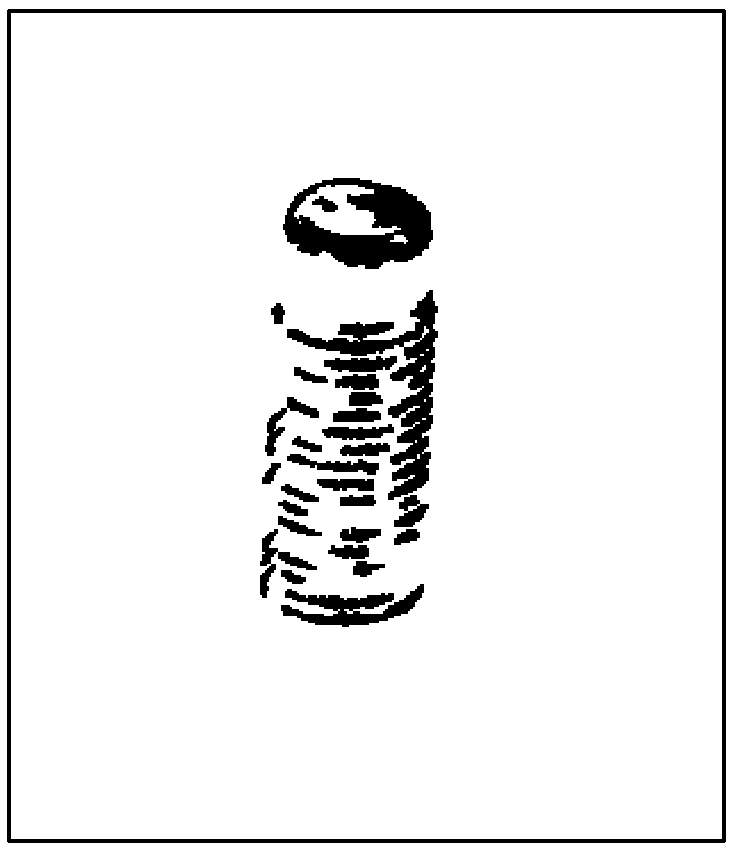
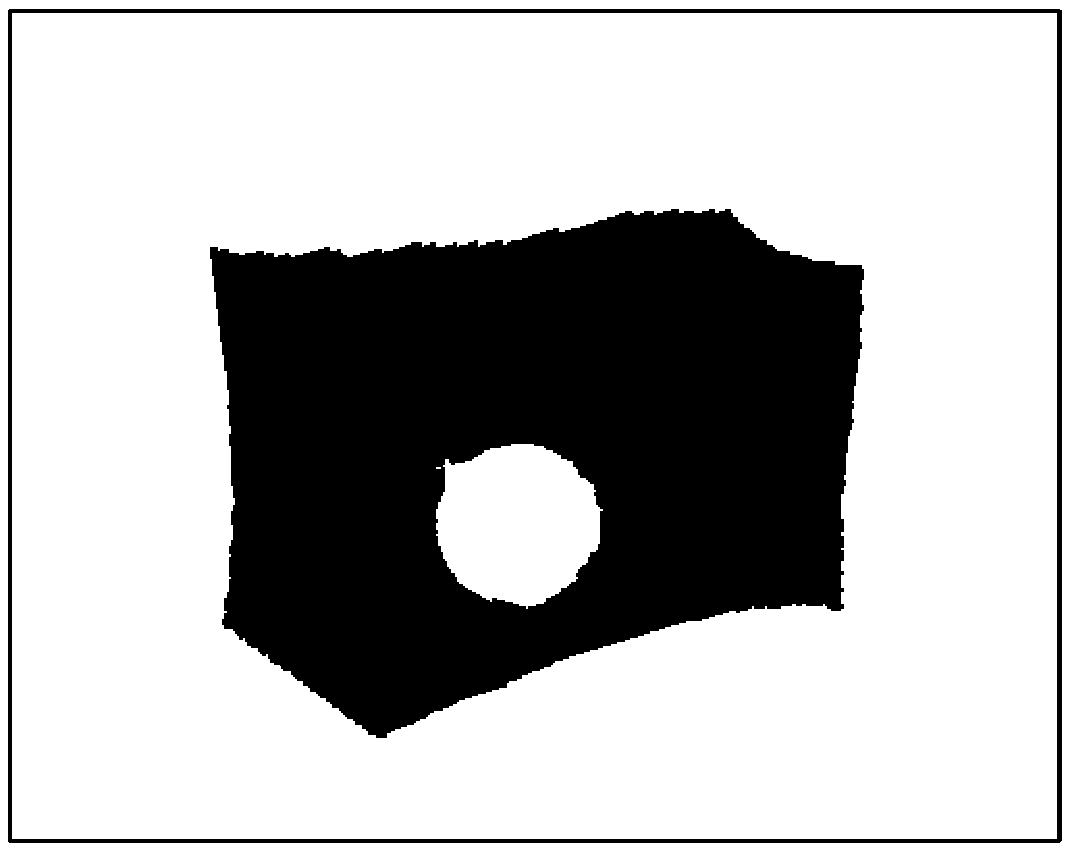
[0022] 1) When the stud is fixed, the plane where it intersects with other objects is the first plane, and the point cloud data of the workpiece is obtained, such as figure 1 As shown, the point cloud data of the stud and the first plane are obtained from it, such as figure 2 , image 3 ; Fit the plane equation M corresponding to the first plane by the method of least squares: Ax+By+Cz+1=0; obtain its normal vector (0.0052,-0.0390,-0.0454);
[0023] 2) Extract the point cloud data of the thread coverage part of the threaded target object, treat it as a cylinder for fitting, and obtain the first fitting cylinder and the axis L of the first fitting cylinder c , axis L c The dire...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More