

Robot finger device
A robot finger and finger segment technology, which is applied in the field of bionic robots, can solve the problems of poor applicability and small grasping range, and achieve the effect of improving applicability and grasping range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The specific implementation manner of the robot finger device in the present invention will now be described in conjunction with the accompanying drawings.
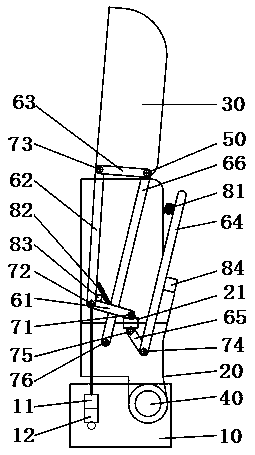
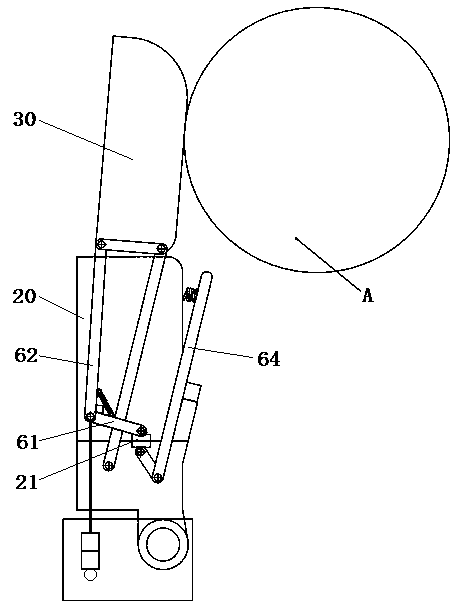
[0030] Such as figure 1 As shown, the robot finger device in the present invention is mainly composed of three parts, which are respectively a base 10, a first finger segment 20 and a second finger segment 30 arranged in sequence, and in the robot finger device, the first finger segment 20 and the second finger segment When the second finger section 30 moves, the base 10 remains fixed. Wherein, the first finger segment 20 is hinged on the base 10 through the proximal joint axis 40 , and the second finger segment 30 is hinged on the first finger segment 20 through the distal joint axis 50 . according to figure 1 The positional relationship expressed in , define the arrangement direction of the base 10, the first finger segment 20 and the second finger segment 30 as vertical, then the first finger segment 20 is pro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More