

An improved ant colony optimization-based collision avoidance planning method for a USV in an unknown static obstacle environment
An optimization method and collision avoidance technology, applied in design optimization/simulation, two-dimensional position/course control, instruments, etc., can solve problems such as insufficient search capabilities of collision avoidance planning methods, and achieve the effect of improving real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be further described below in conjunction with the accompanying drawings.
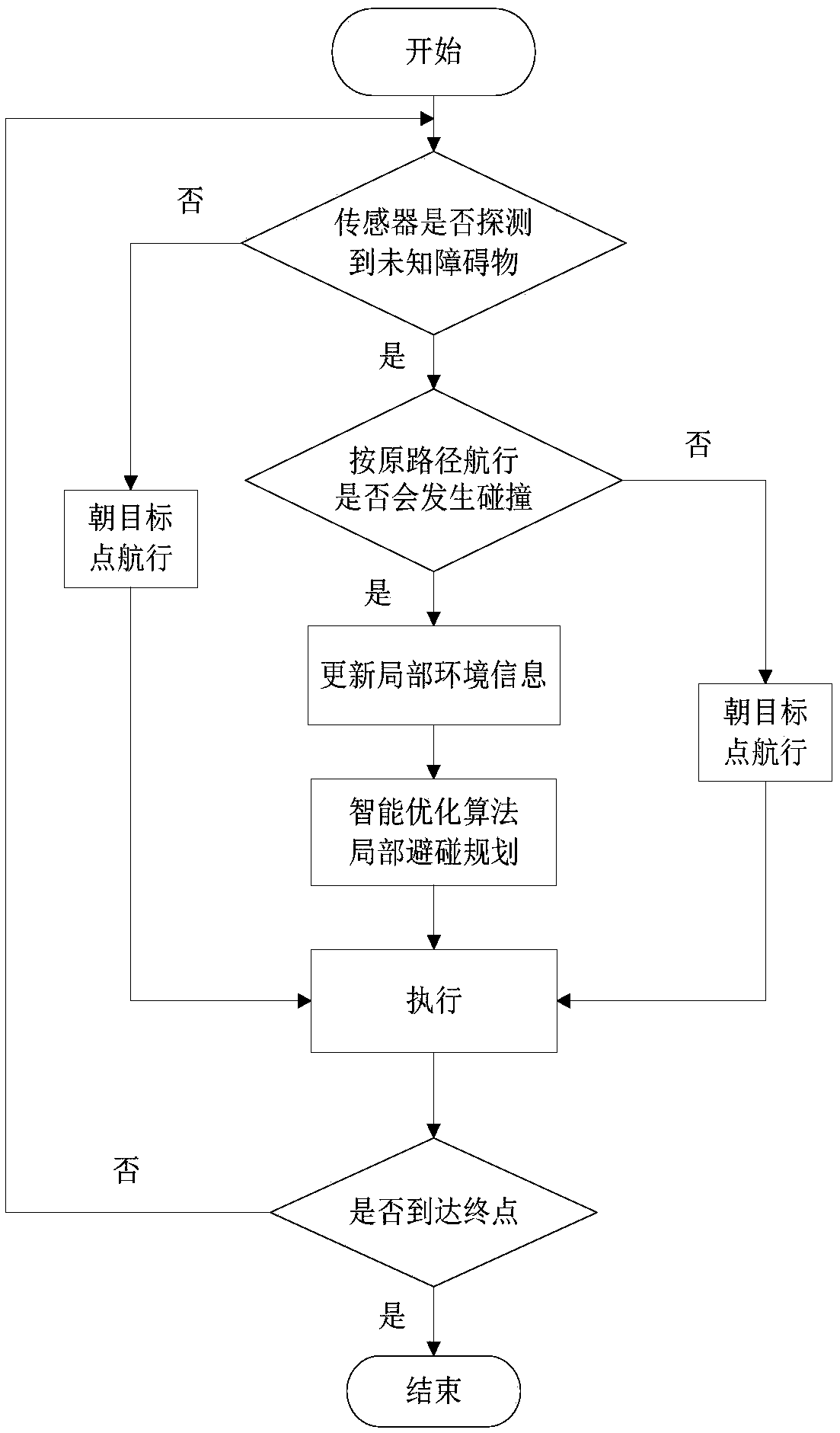
[0040] A USV dynamic collision avoidance planning method based on an improved ant colony optimization algorithm, comprising the following steps:
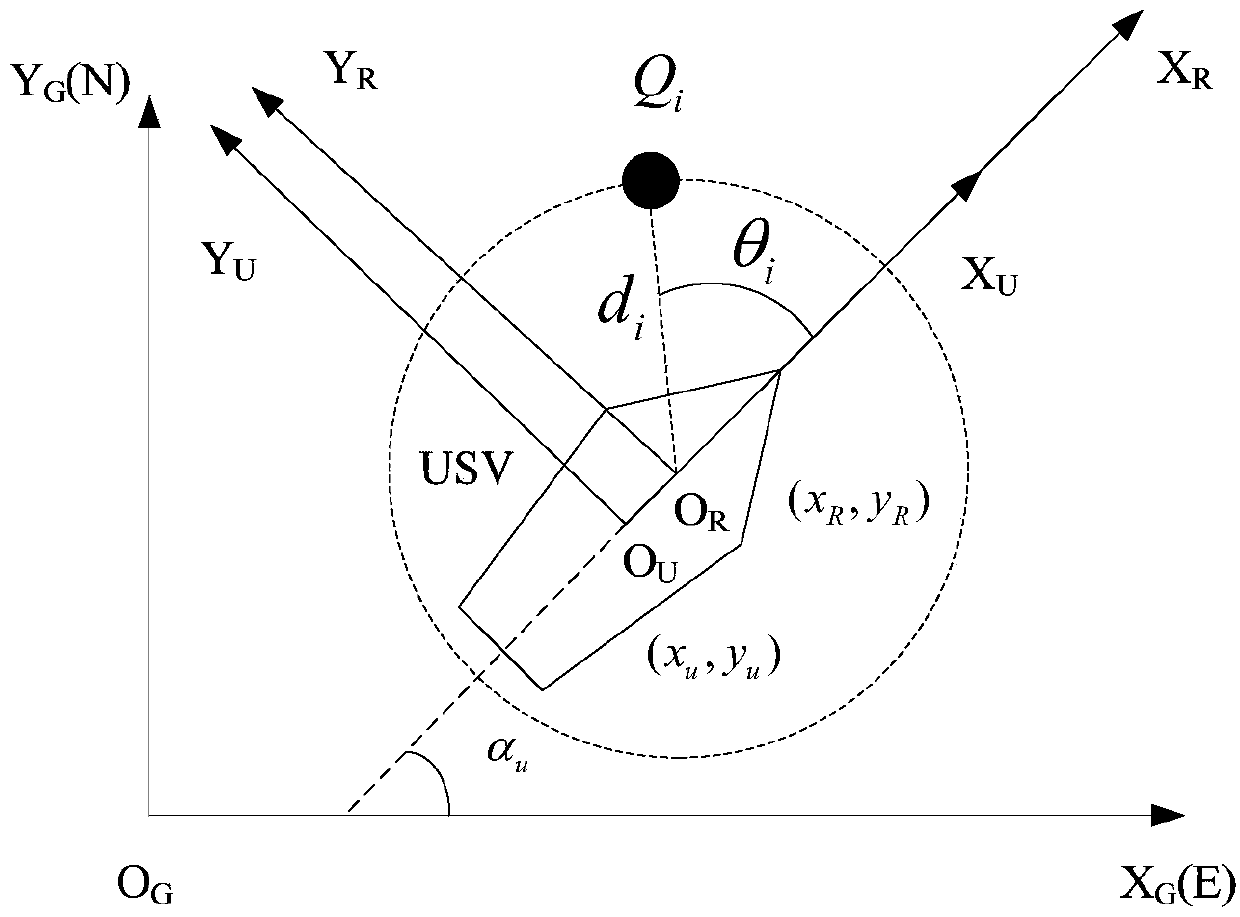
[0041] Step 1: Build a global coordinate system and a local coordinate system, and establish a navigation radar simulation model;
[0042] The global coordinate system adopts the north-east coordinate system, the upper left corner of the map is the origin, the east direction is the X axis, and the north direction is the Y axis.
[0043] The local coordinate system is divided into a boat-borne coordinate system and a sensor coordinate system. The boat-borne coordinate system is a rectangular coordinate system established with the USV as the origin, and the sensor coordinate system is established with the navigation radar as the pole and the USV forward direction as the polar axis. Polar coordinate system.
[0044] The detec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More