

Robot-vision-guided mobile phone flashlight assembling system and method
A technology of robot vision and assembly method, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of low precision, poor flexibility, and low labor efficiency of automatic assembly technology
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] In order to enable those skilled in the art to better understand the technical solutions of the present invention, the present invention will be further described in detail below in conjunction with the accompanying drawings.
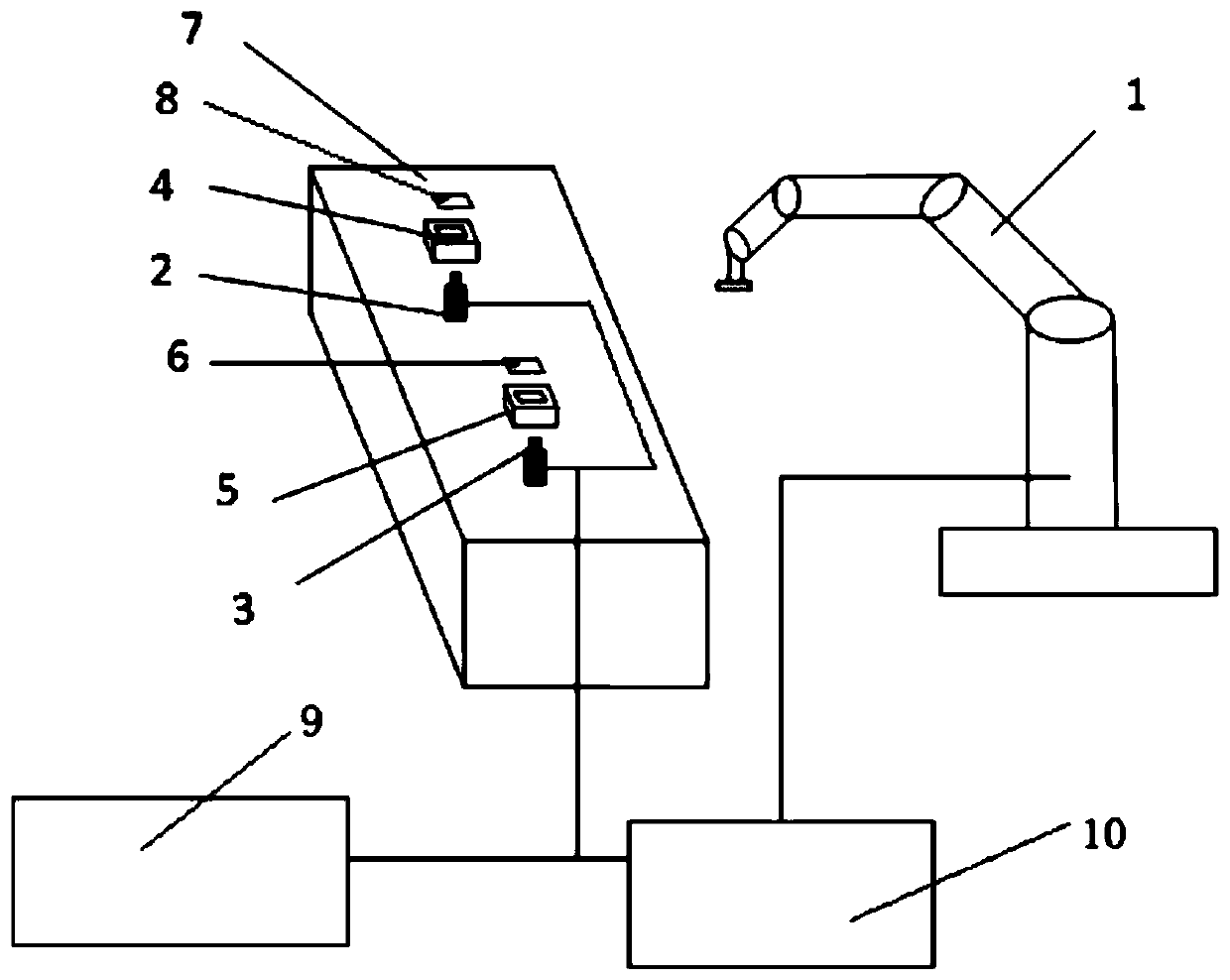
[0058] like figure 1 As shown, a mobile phone flash assembly system guided by robot vision, including:
[0059] Workbench 7, said workbench 7 is provided with a first industrial camera 2 for taking pictures of said flashlight, and a second industrial camera 3 for taking pictures of said mobile phone glass backplane, said first industrial camera 2 Above is provided with the first coaxial light source 4 for auxiliary imaging, above the second industrial camera 3 is provided with a second camera position 6 for placing the glass backboard of the mobile phone, and the second industrial camera 3 and the first A second coaxial light source 5 for assisting imaging is provided between the two photographing positions 6;
[0060] Robot 1, used to move the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More