

Biped autonomous walking intelligent robot
A technology of intelligent robots and walking mechanisms, applied in the field of robots, can solve problems such as mechanical parts being easily damaged, property loss, and robot damage, and achieve the effects of reducing the probability of damage, realizing steering operations, and preventing program disorder
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
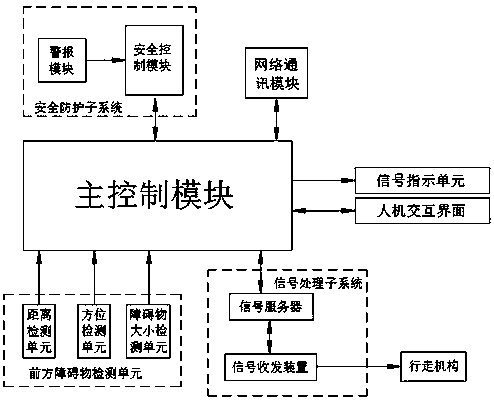
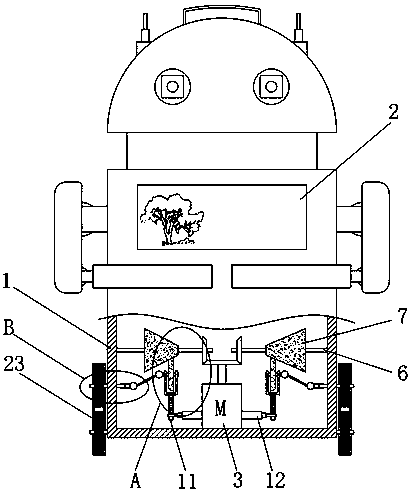
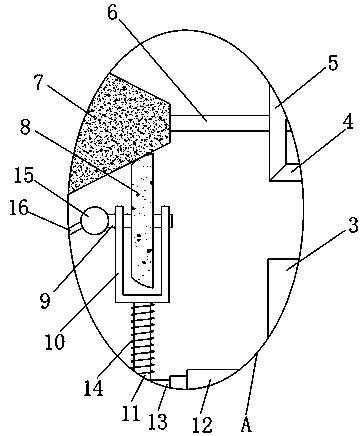
[0030] refer to Figure 1-5 , a biped autonomous walking intelligent robot, including a robot body 1, the robot body 1 includes a main control module, the main control module is electrically connected with a safety protection subsystem, a network communication module, a front obstacle detection unit, a signal processing subsystem, a signal Indication unit, man-machine interface;
[0031] The main control module is composed of an embedded microprocessor and a data storage card. The network communication module includes a wireless communication device based on Ziggbee technology for data communication with a remote server. The safety protection subsystem includes a safety control module and an alarm module. The module is directly electrically connected to the main control module, and the safety control module is electrically connected to the alarm module, which is used for alarm work in abnormal situations;
[0032] The main control module is connected with the human-computer i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More