

Planning method of automatic driving system
An automatic driving and planning technology, which is applied in the direction of instruments, biological neural network models, character and pattern recognition, etc., can solve problems such as complexity, insufficient environmental information, and the inability of automatic driving systems to perform precise strategy planning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described below in conjunction with drawings and specific embodiments, so that those skilled in the art can better understand the present invention and implement it, but the examples given are not as limitations of the present invention.
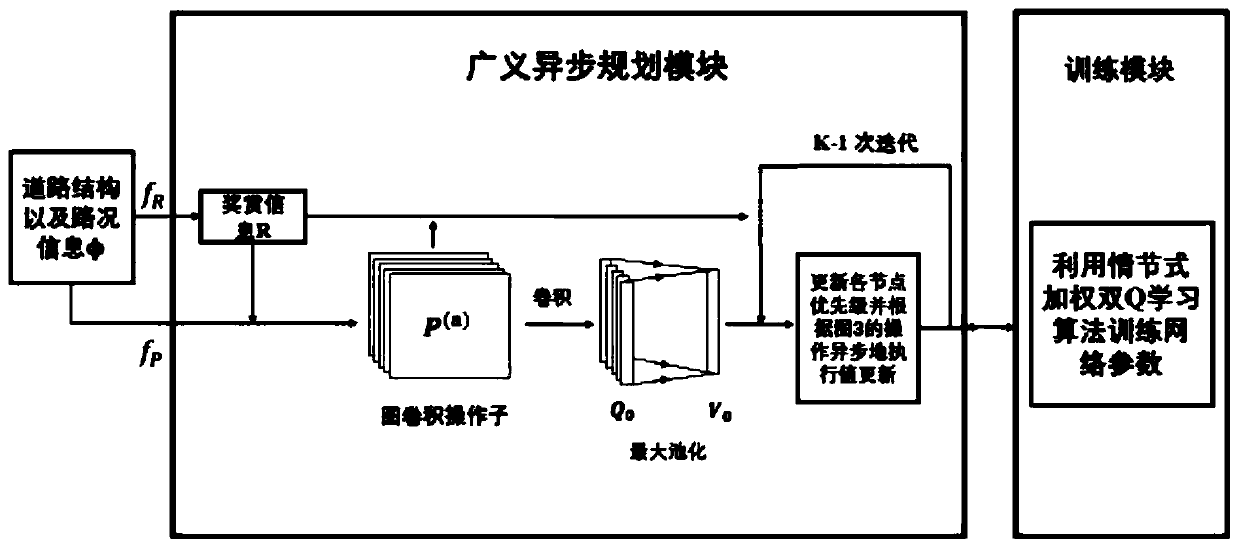
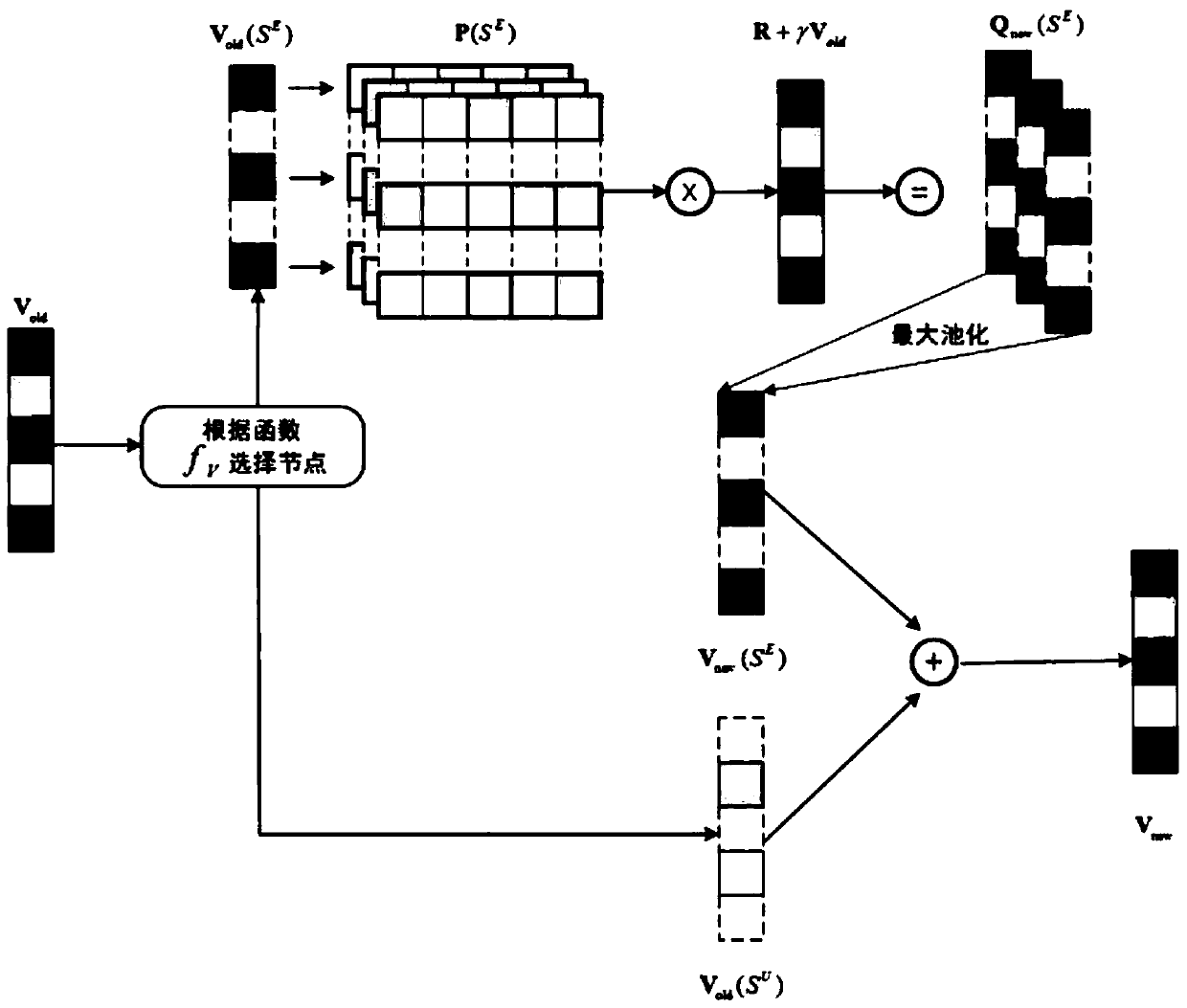
[0028] One of the innovative points of this patent is that the planning strategy of the traditional automatic driving system cannot be well generalized to the road environment with more complex road structure and unknown road condition information, which will reduce the user's driving experience and even increase the risk of driving , and this patent uses the value iterative network to perform the planning function, so that the planning strategy obtained by the unmanned vehicle during driving has good generalization ability even in the road environment with complex structure and unknown road condition information . The second innovation point of this patent is that the convolution process is perfo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More