A knowledge transfer combined reinforcement learning method and a learning method applied to autonomous skills of an unmanned vehicle
A technology that strengthens learning and knowledge, applied in the field of artificial intelligence, can solve problems such as complexity growth, scale increase, dimension disaster, etc., and achieve the effect of overcoming slow speed, making significant progress, and improving learning speed and efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0064] combine Figure 1 to Figure 5(b) As shown, a reinforcement learning method combined with knowledge transfer provided in this embodiment is characterized in that it specifically includes the following steps:
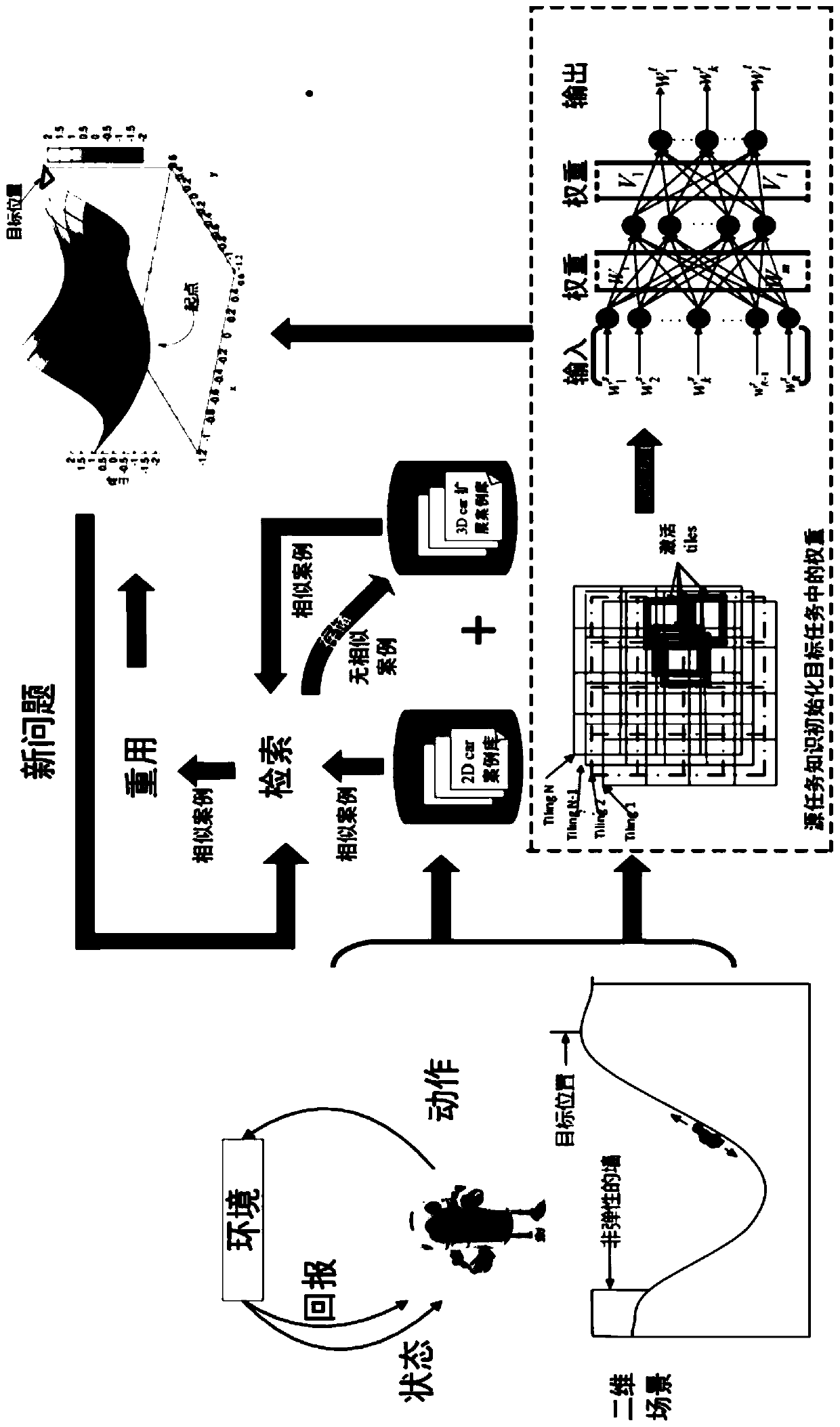
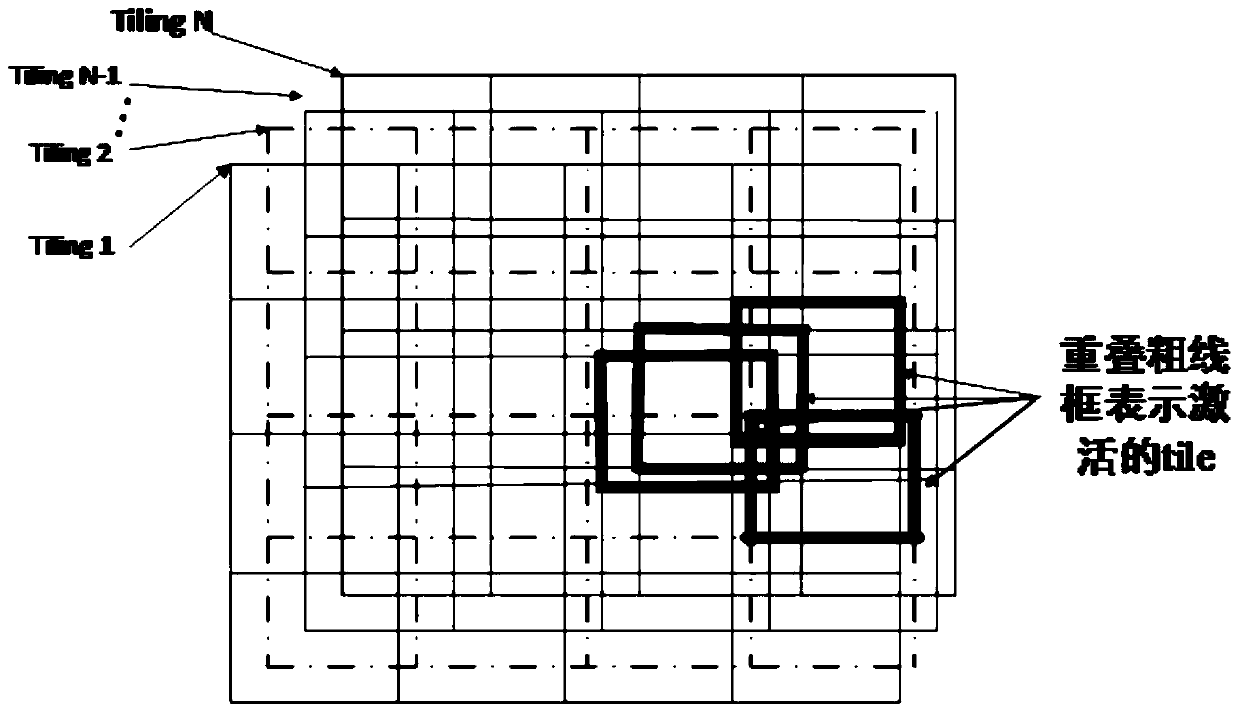
[0065] S1. Design the mapping relationship between the autonomous tasks of the BP neural network, initialize the target task by mapping the learning experience in the source task, and set a good prior for the target task;
[0066] S2. Store the source task learning experience as a case, and build a linear perceptron to learn the action mapping relationship between the source domain and the target domain;
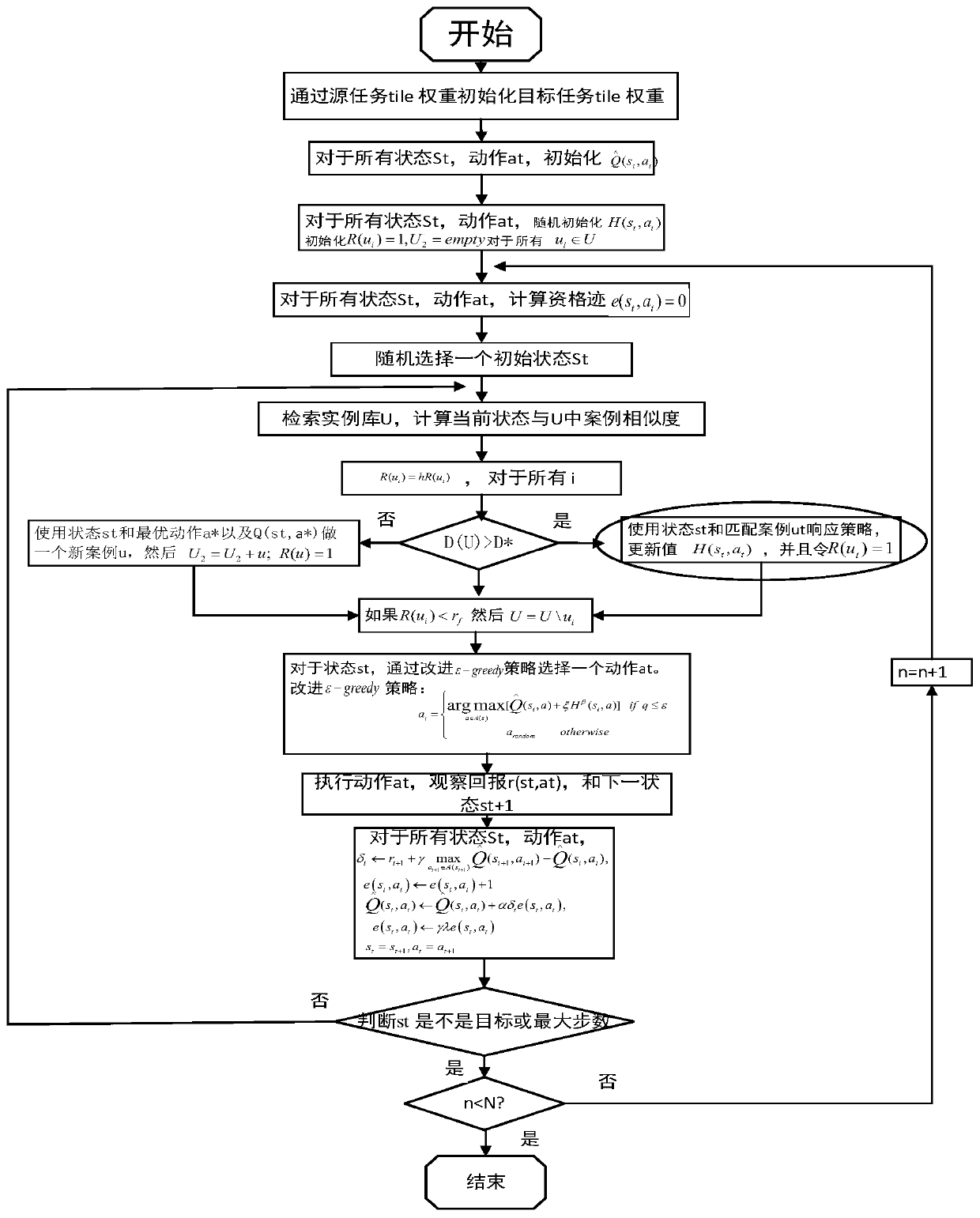
[0067] S3. Use the case-based reasoning mechanism to store the online learning experience of the target task to expand the case base, and propose a progressive forgetting criterion to clear the long-term unused information in the experience stored in the case base to reduce matching retrieval time;
[0068] S4. Carry out similarity calculation and case retrieva...
Embodiment 2
[0124] combine Figure 6(a) to Figure 9(b) As shown, this embodiment also provides a learning method applied to the autonomous skills of unmanned vehicles. The method shown in Embodiment 1 is used for learning, and the autonomous skills of unmanned vehicles are learned on the unmanned vehicle simulator, and the source task and When the target tasks are different, perform distributed retrieval processing on the cases in the case library;
[0125] Consider driving an underpowered car up a steep mountain road, as shown in Figure 6(a). But because the force of gravity is greater than the power the car's engine can generate, it is difficult to charge up the slope even with the maximum throttle. The solution is to go to the slope in the opposite direction first, and then rely on inertia and a large throttle to rush to the target slope. The reward value for each step of this task is -1. There are 3 optional actions: large throttle (+1), reverse large throttle (-1), and empty throt...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com