

Visual inertial ranging method and system of tightly coupled vehicle wheel coder data
An encoder, tightly coupled technology, applied in the field of positioning and navigation of fusion multi-sensor
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0116] Preferred embodiments of the present invention are described below with reference to the accompanying drawings. Those skilled in the art should understand that these embodiments are only used to explain the technical principles of the present invention, and are not intended to limit the protection scope of the present invention.
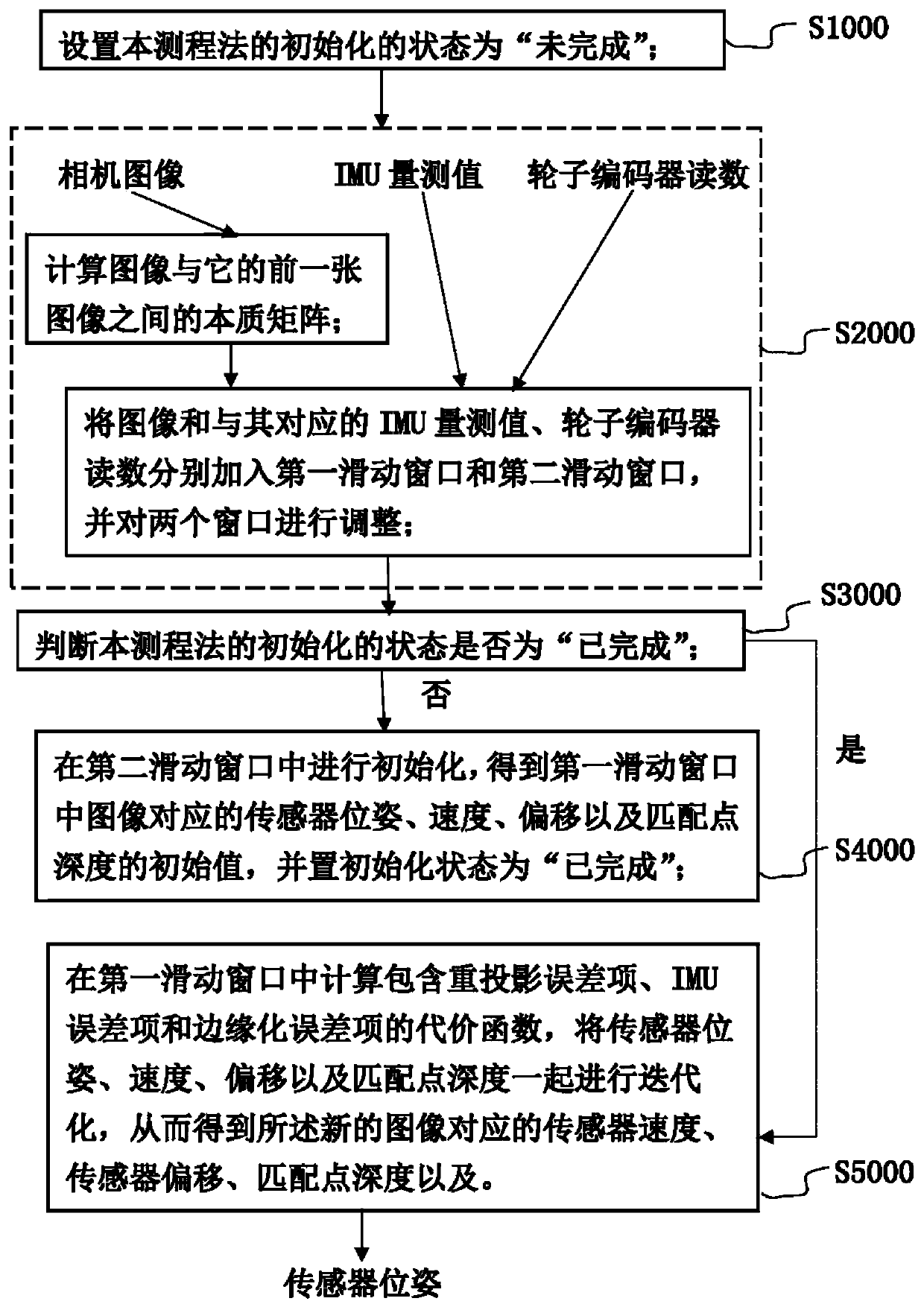
[0117] The invention provides a visual-inertial odometry method tightly coupled with vehicle wheel encoder data, using the image of a monocular camera, the accelerometer data and gyroscope data in the IMU and the wheel encoder data, and integrating the IMU and the wheel encoder data in the pre-integration stage The wheel encoder data is used to perform camera tracking with an accurate scale of degrees of freedom during the nonlinear optimization stage, thereby reducing the error generated during vehicle driving.
[0118] In order to make the above objects, features and advantages of the present invention more comprehensible, the present invent...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More