

Planning method of industrial robot joint space synchronous movement
An industrial robot and joint space technology, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve the problems of non-smooth transition of motion speed and acceleration, poor anti-shake performance, etc., and achieve good anti-shake performance, easy to implement, and method simple effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] Below in conjunction with accompanying drawing, method of the present invention is described in further detail:
[0056] Running this method in the robot motion controller is to know the starting point and end point of each joint motion of the robot expected by the user, and plan the motion state of each joint of the robot at each moment between these two points to ensure that the joints of the robot move synchronously. And its speed, acceleration smooth transition.
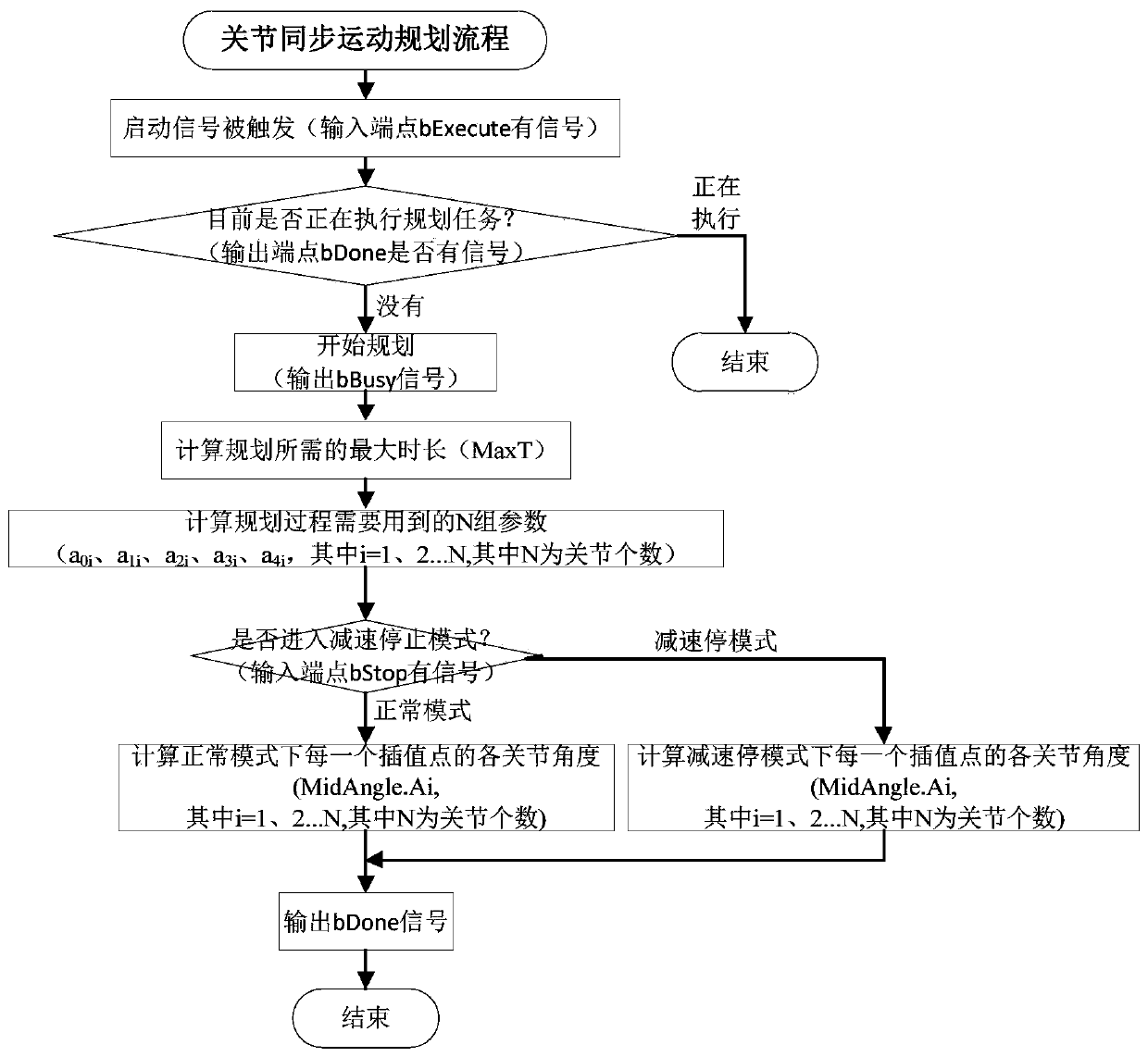
[0057] Such as figure 1 As shown, this method is a program instruction running in the motion controller, and its running process is:
[0058] Step [1] Start the motion controller;
[0059] Step [2] Obtain the end point sEndP.A of the desired joint movement of the robot i and the starting point sStaP.A i ;
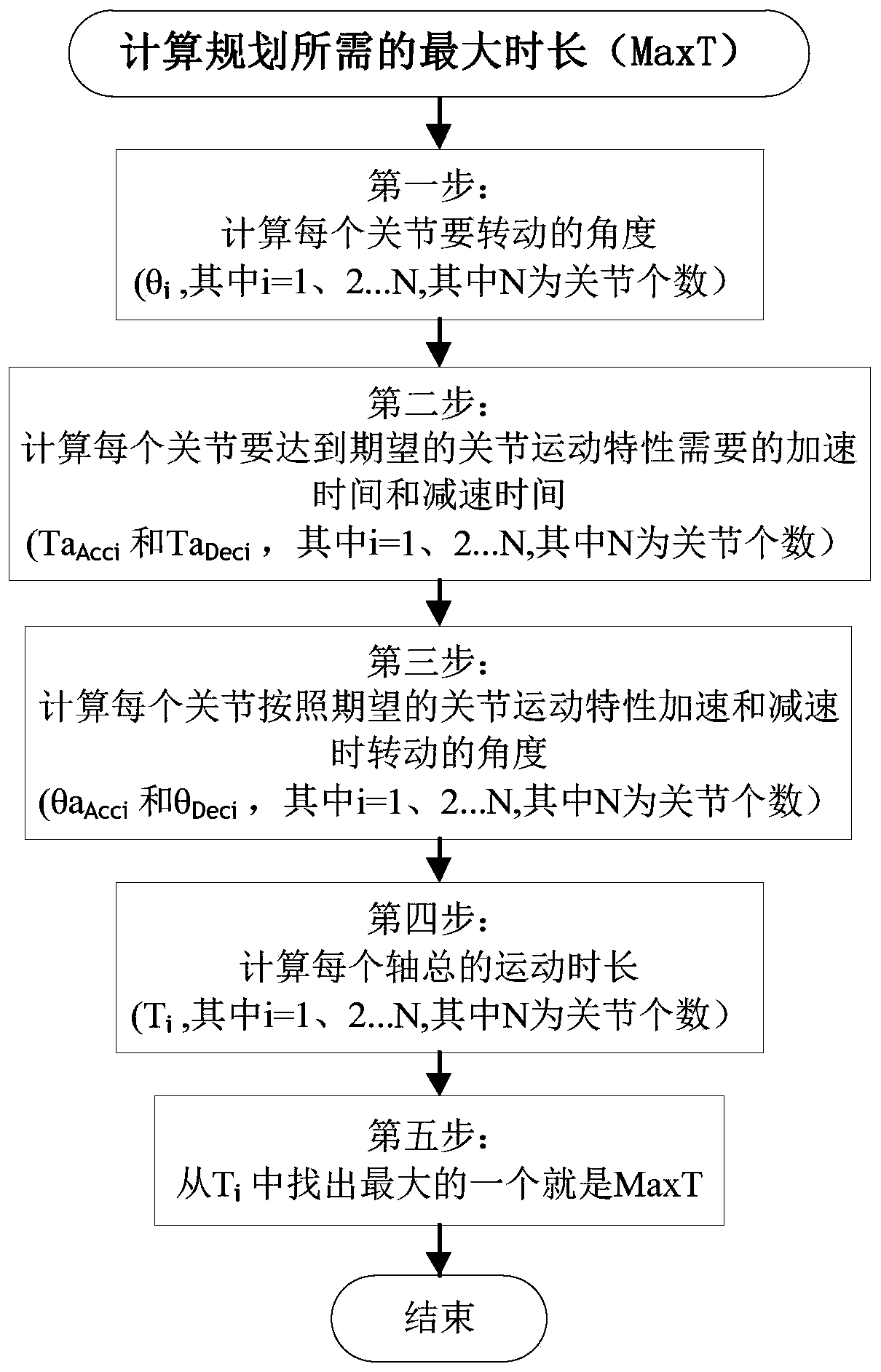
[0060] Step [3] Calculate the maximum time required for planning MaxT based on the known starting point and end point; the specific steps are:
[0061] Step [3.1] Calculate the angle θ that each m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More