

Unmanned aerial vehicle autonomous tracking and positioning system and method based on network RTK
A positioning system and network positioning technology, used in radio wave measurement systems, positioning, measuring devices and other directions, can solve the problems of uncertain positioning coordinates, positioning offsets, large errors, etc., to achieve strong anti-interference ability, stable operation, The effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The technical solution of the present invention will be further described in detail below in conjunction with the accompanying drawings, but the protection scope of the present invention is not limited to the following description.
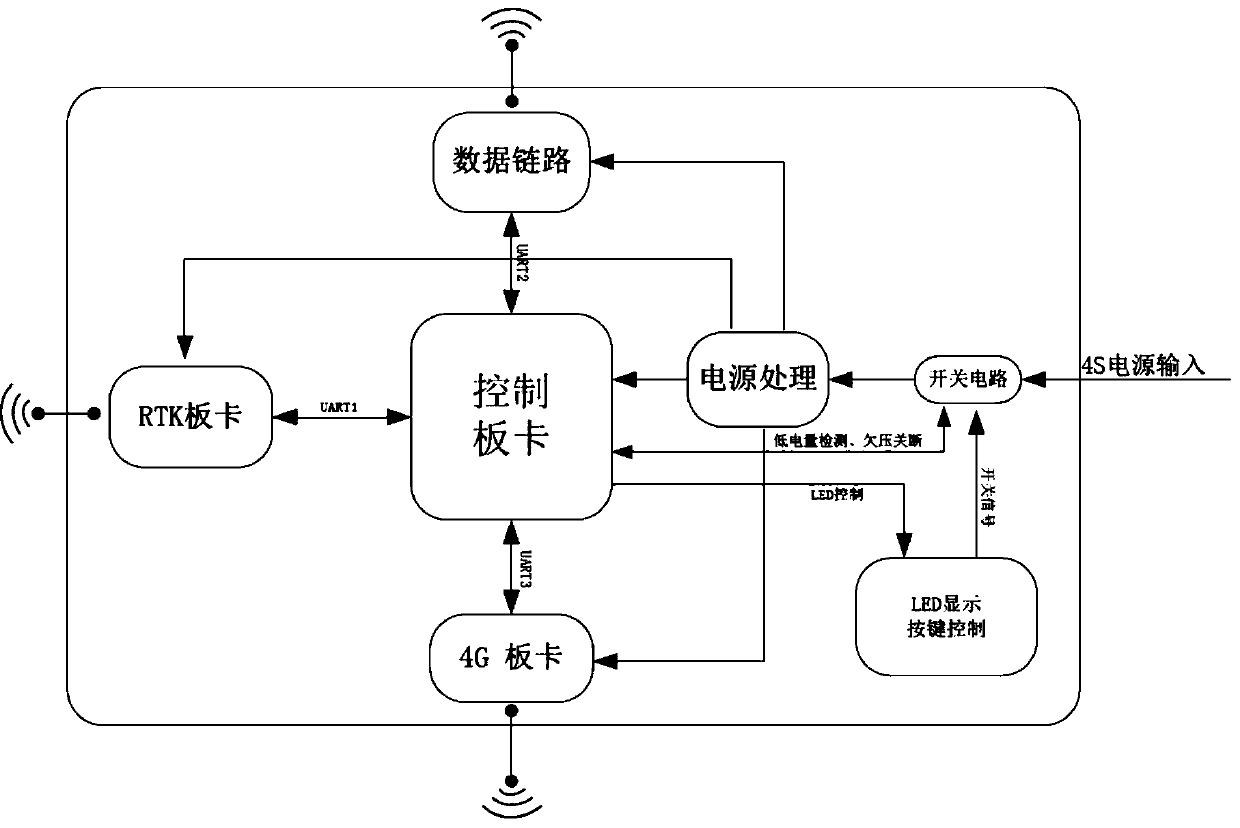
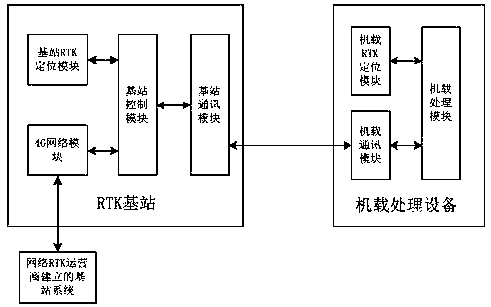
[0041] Such as figure 1 As shown, a UAV autonomous tracking and positioning system based on network RTK, including:
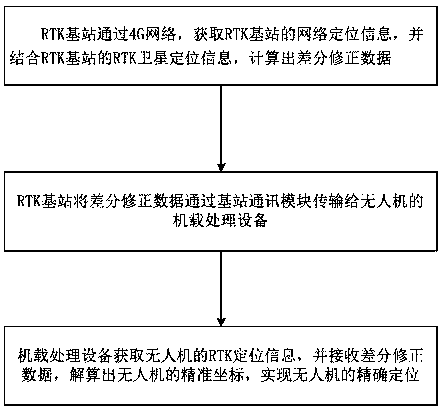
[0042] The RTK base station is used to obtain the network positioning information of the network RTK base station group through the 4G network, combine it with the RTK satellite positioning information of the RTK base station, calculate the positioning and calibration data of the UAV, and transmit it to the onboard processing equipment of the UAV;
[0043] The on-board processing equipment of the drone is used to combine the RTK satellite positioning information of the drone with the positioning calibration data from the RTK base station to calculate the precise position of the drone and realize the precise positioning of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More