Unmanned aerial vehicle aerial video moving small target real-time detection and tracking method
A real-time detection, small target technology, applied in the field of computer vision, can solve the problems that need to be further improved, target occlusion and light transformation is not robust enough, so as to reduce the detection frequency and overall time-consuming, improve the representation ability, and reduce the time-consuming. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The technical solution of the present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments, and the following embodiments do not constitute a limitation of the present invention.
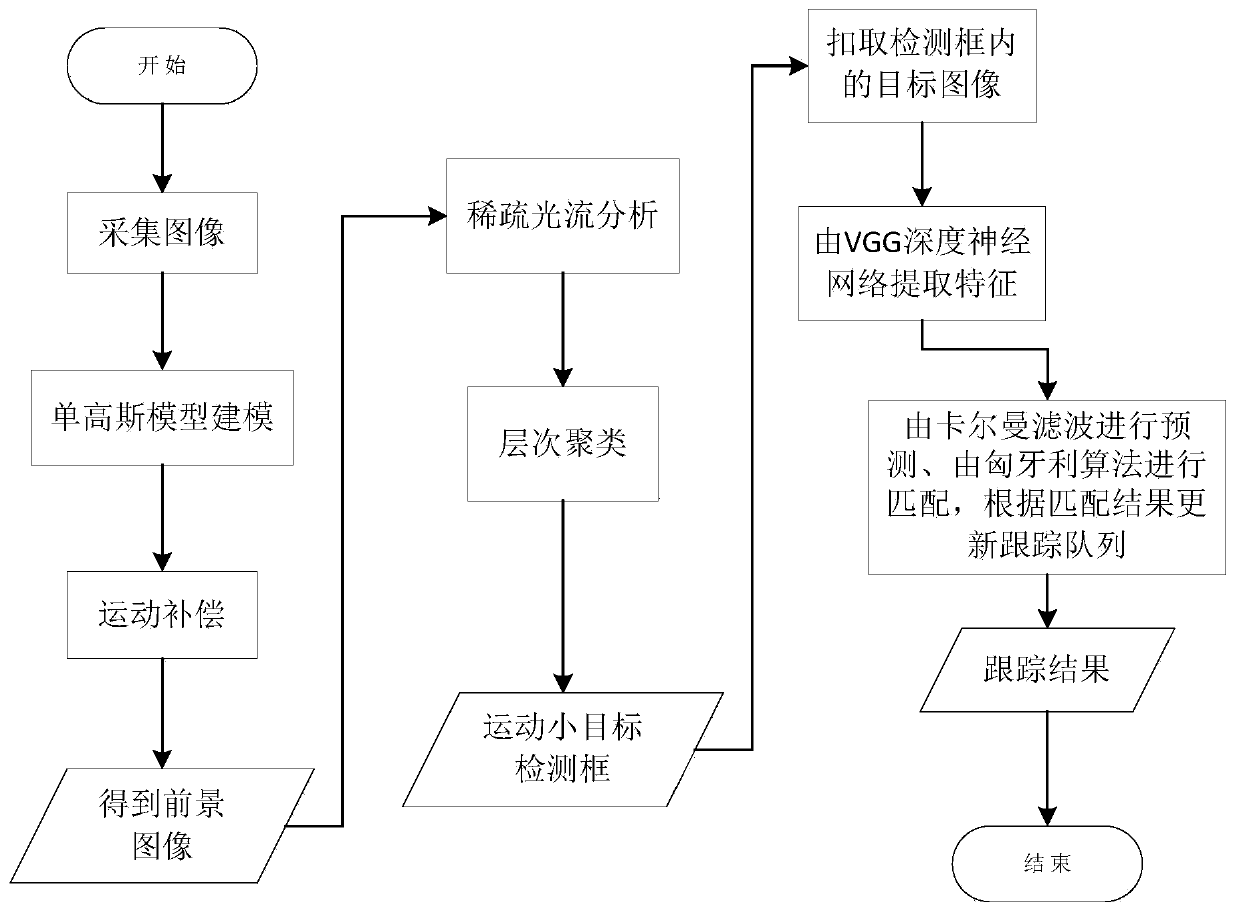
[0049] Such as figure 1 As shown, a method for real-time detection and tracking of moving small targets in UAV aerial video, including:
[0050] Step S1. For the video image sequence captured by the UAV, a frame of image is extracted at intervals of one frame, and real-time detection and tracking are performed frame by frame.
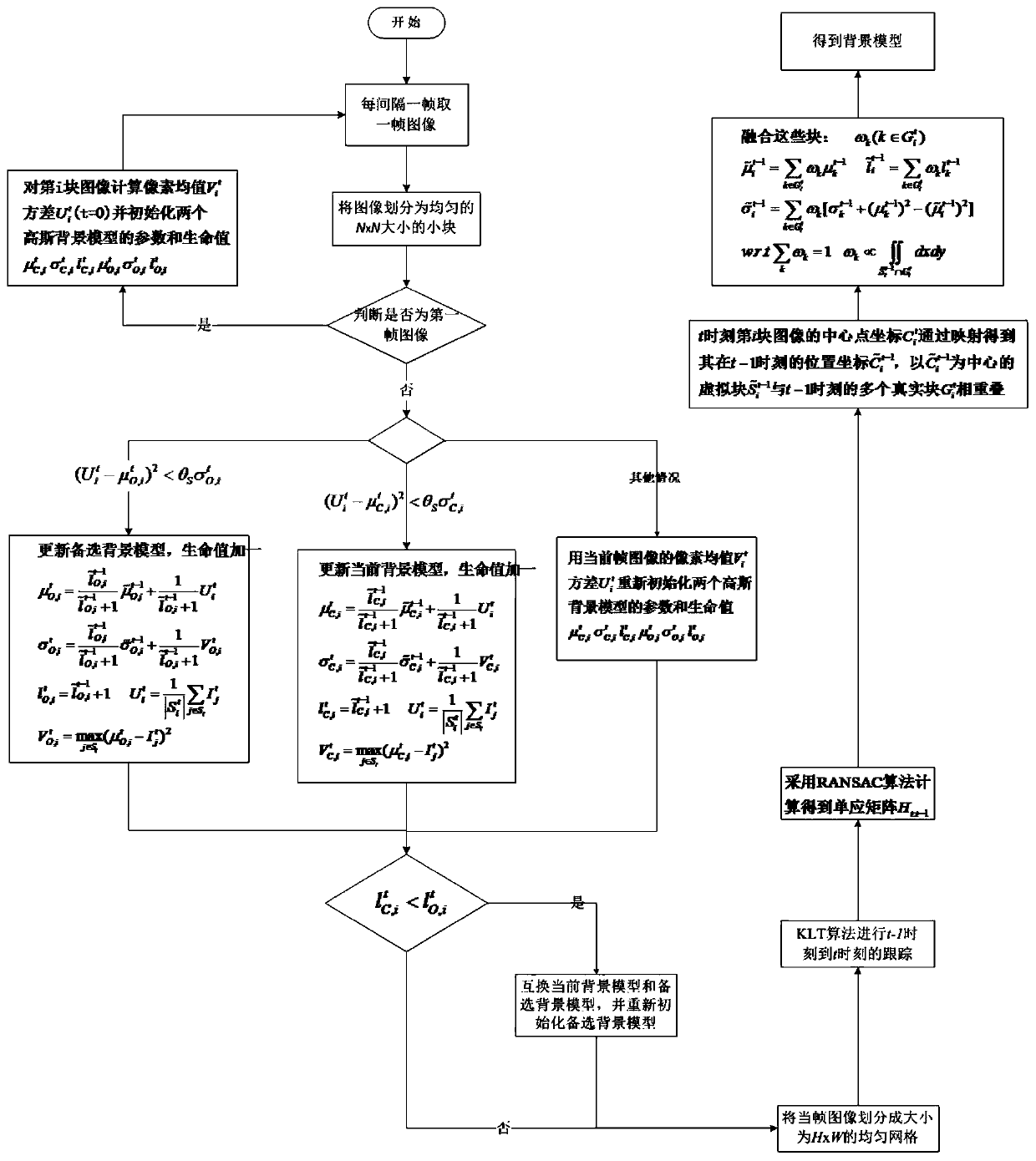
[0051] The present invention includes two processes of detecting a small moving target and tracking the collected video by using the obtained small target. The specific steps for realizing the detection of a small moving target are as follows:
[0052] In this embodiment, for the sequence of video images shot by the UAV, one frame of image is extracted at intervals of one frame for subsequent processing.
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More