

A binocular stereo ranging method for bionic underwater robot fish
A technology of binocular stereo and ranging method, which is applied in the direction of instruments, measuring devices, radio wave measuring systems, etc., can solve the problems of inability to meet real-time performance, inability to make timely and effective judgments, few effective depth points, etc., and achieve high precision Underwater obstacle avoidance detection, make up for the short-range flow field interference, and reduce the effect of insufficient light
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. All other embodiments obtained by persons of ordinary skill in the art based on the embodiments of the present invention belong to the protection scope of the present invention.
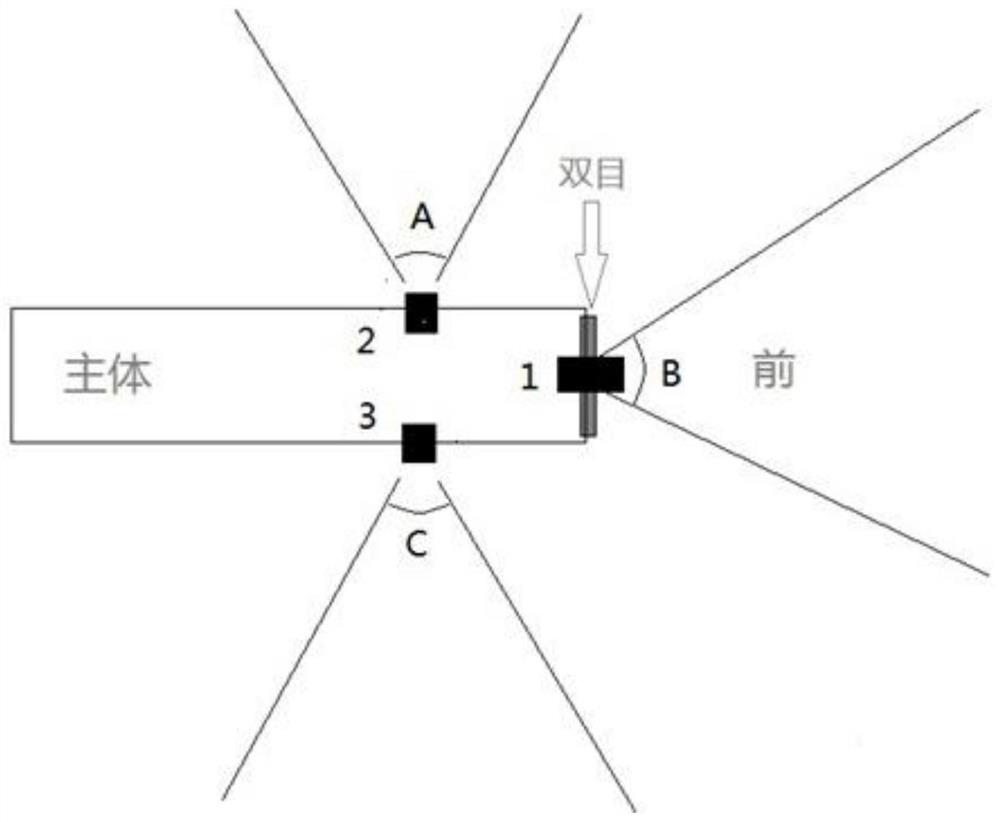
[0033] like Figure 1-8 As shown, a bionic underwater robotic fish binocular stereo ranging method according to an embodiment of the present invention comprises the following steps:
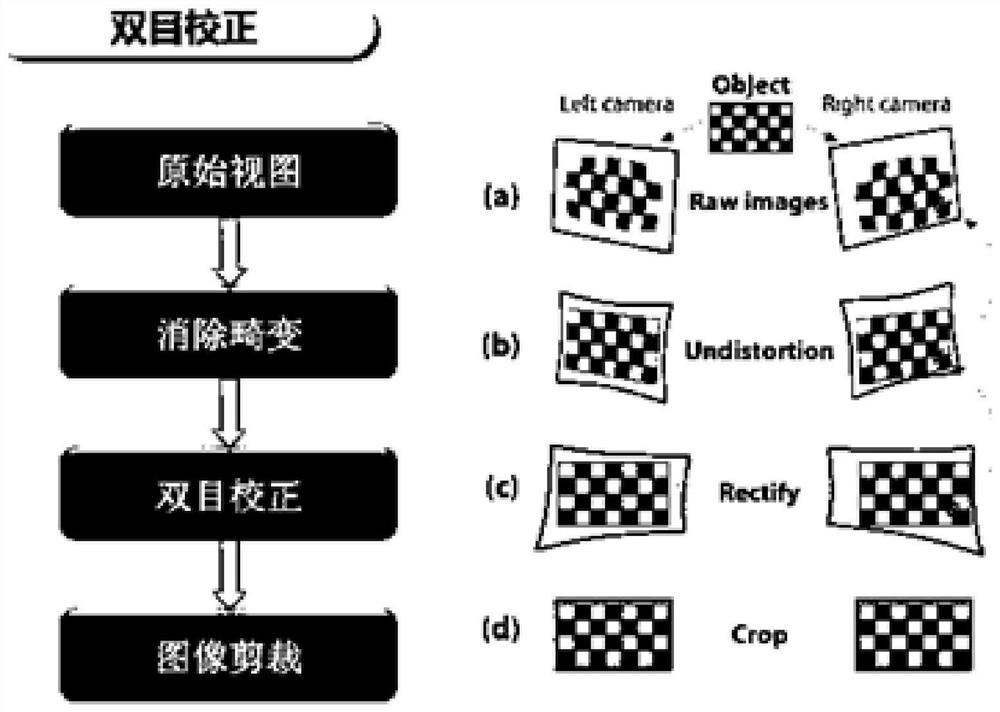
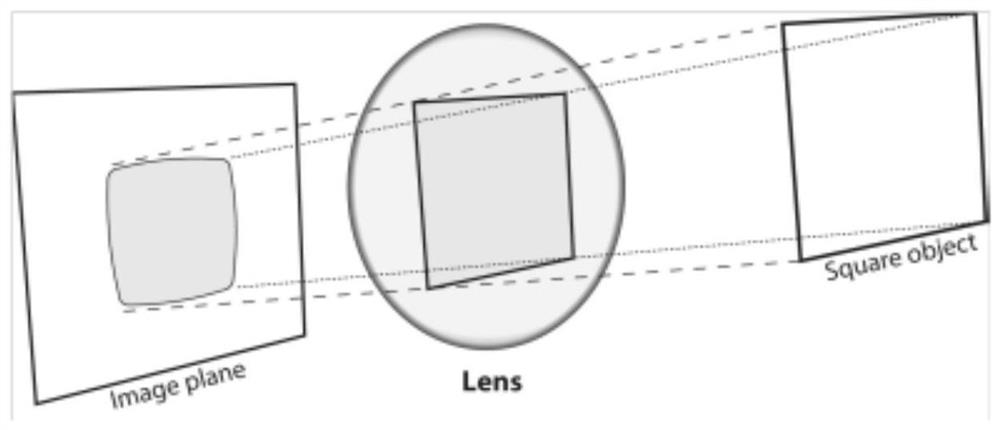
[0034] S1 camera calibration: calibrate the binocular camera; during the calibration process, correct the ideal projection model with reference to the camera distortion state;
[0035] S2 Stereo Matching: Matching is performed by means of epipolar constraints. Specifically, the SGBM algorithm is used to find th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More